
“基本上,我们的工作是关于如何使用混沌动力学来设计自发切换行为的,”合著者中岛幸平说。他是日本东京大学的应用数学家。通常,工程师设计一个可以行走和奔跑的机器人,然后实验者可以使用外部手持控制器来切换这些“行为”。但是,为了从这种受控环境过渡到机器人可以自主切换行为的环境,研究人员试图模拟混沌运动。通常在动物和其他动力系统的大脑中会看到混乱的路由,这是因为系统无法预测地但确定性地在几种定型模式(例如行走,奔跑或任何其他形式的行为)之间进行切换。

过去的经验
东京大学的研究生论文作者井上胜Kat说,过去机器人学一直试图模仿混沌运动。一个机器人于2006年创建,它为具有体感系统和数百个代表身体肌肉的电动机建模了一个人类婴儿,每个电动机都连接到多个混沌振荡器上,这相当于运动神经元的粗略等价物。体感系统与混沌振荡器相互作用,然后向“肌肉”发出信号。该系统旨在模拟人类运动技能的早期发展,通过交替改变几种刻板印象的行为(包括爬行和翻滚)来再现混沌运动。
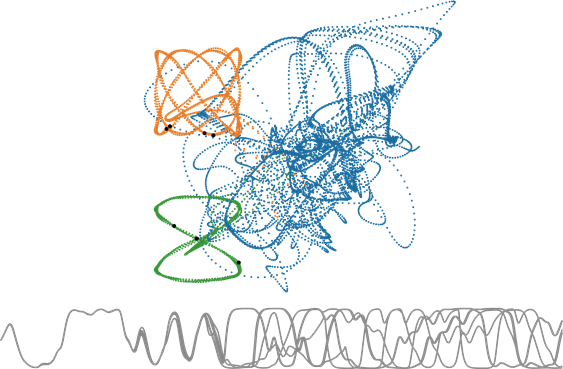
该图像中的蓝色,橙色和绿色代表作者为机器人大脑自主切换而设计的各种行为。为此,研究人员创造了一种称为混沌运动的现象特征。来自“通过混沌迭代设计自发行为切换”演讲的图像(井上胜男,中岛晃平和国芳康男)。
其他研究集中在使用具有较高层次神经网络的层次结构来开发机器人中的自发切换行为,该高层神经网络驱动对应于每种行为类型的较低层次模块。但是,中岛晃平认为,在这些实验中,学习过程要花费很多时间。
系统如何独特?
为了克服这些问题,日本研究人员没有使用分层设计。相反,在使用机器学习框架的三步法中,研究人员首先确定了几种可能的行为,并训练了神经网络根据命令来再现它们。然后研究人员训练网络以特定顺序在这些行为之间进行切换,并最终利用混沌动力学发展了这些行为之间的概率转移。结果是一个具有混沌运动特征的系统。

(A) , . : - (ESN) ESN. ESN ESN, , ESN . ESN - , ESN ESN , 0. (B) . . , . , , CI. , . 1 , . 2 3 . 2 3.
接下来会发生什么?
该研究的关键思想是创造一种类似于动物的自发运动的更简单,更优雅的方式。但是,迄今为止,这项研究的实施仅限于计算机上的神经网络。现在,研究人员计划将计算机从物理机器人转移到物理机器人,以期最终创造出具有自主性和自发性的机器。
头脑的可塑性是人脑的一个独特特征,它使人们能够在不破坏旧记忆的情况下获得新知识。科学家认为这项研究是朝着创造一个合成大脑迈出的一步,该大脑具有可以通过人造身体与环境相互作用的记忆。
参考文献列表:
- Adam Smith. AI with “spontaneous” behaviour like animals developed [ ]. URL: www.independent.co.uk/life-style/gadgets-and-tech/scientists-ai-spontaneous-behaviour-animals-b1762407.html
- Amy MacDermott. New technique builds animal brain–like spontaneity into AI [ ]. URL: blog.pnas.org/2020/11/new-technique-builds-animal-brain-like-spontaneity-into-ai
- : Katsuma Inoue, Kohei Nakajima, Yasuo Kuniyoshi. Designing spontaneous behavioral switching via chaotic itinerancy [ ]. URL: advances.sciencemag.org/content/advances/6/46/eabb3989.full.pdf