欢迎来到Marleson芭蕾舞的第二部分。
兼职。
首先,我们讨论了这种疾病在俄罗斯联邦境内的一般情况,今天,我们将讨论当您从裙skirt下很远地爬到罗伯特时会发生什么。
我将在引言中插入以突出显示-我对Khabravchanin的最深深的歉意,他在我以前的文章中写了一篇有关kawasaki和圣彼得堡万能的信息。我真的很抱歉,我的可用性不是拨出“投诉”按钮而不是“回复”按钮的借口。这纯粹是我的粗心,我什至没有时间记住您的昵称道歉。如果不打扰您,请敲一下下午,以便我亲自向您道歉。我敢肯定,只有良心的谦虚才能阻止您迈出这一步,并在昨天发表了评论“ What the hell!”。好吧,我们还没有开始-我积累了很多杂色的信息。将有关于进入该行业的职位,将有微控制器的编程,在组织和管理开发过程中将有奇迹,等等。在这方面,将在其中散发材料的中心将浮动,以免阻塞无关信息的主题领域。
现在开始吧!(c)尤里·加加林(Yuri Gagarin)。
我们在做什么?
正如我们在第一部分中与您讨论的那样,罗伯茨是“从这里挖午餐”的理想选择,因为这些操作是标准化的,并且他循环执行同一程序。
但是,如果不是这样呢?如果我们需要小批量生产200件,会发生什么情况?加载复合体一周。一周后-将另一种产品放在那里。只有一种出路-通过遥控器找到带有手柄的程序。我在上一篇文章中强调了这一神圣仪式的不便之处。
让我们加剧。但是,如果-一种产品呢?
以提供的善意为例瓦赫拉莫夫例如铣削船壳。在造船业上并不强(嗯,除了焊接微板,造船厂只用嘲讽来称呼这种格列佛的名字-这些是几米长,重达数百公斤的傻瓜),但我可以假设以下传统知识:
- 我们有一些船体的CAD模型。
- 我们有一个非图形化尺寸的立方体,它是由铣削而成的。
- 我们要戳一下按钮,然后让软件创建魔术,然后立方体(或平行六面体)中的机器人本身就铣削并验证了某些东西。
实际上,问题对我们来说很简单(此问题并未得到具体解决)。有一个3D模型,运动系统上有一个空白和一个罗伯特。我们需要在机器中为其创建一个程序,实时控制其实现,运行扫描仪,比较期望值和实际情况,然后完善一些东西。
我们将在以后谈论编程,3D解析的细微差别,运动学的逆问题,控制程序的形成,扫描仪和照相机。显然,这项任务并不简单,我们用袖子沾满幸福的眼泪,陷入了这一过程。但是,罗伯特像一个荒唐的年轻女士一样,自豪地拉起他的长鼻,问道:
-为什么所有的注意力都集中在这些程序上?你为什么只在那里做些什么?那我呢?什么,他们白白做了我吗?
好吧,它抛出了很多功能。我们将讨论。
奇点
与罗伯特沟通的方式等待着我们的第一件事。事实是,单手程序可以用两种主要坐标编写:笛卡尔坐标和关节坐标。第一个是XYZ位置以及围绕每个轴的旋转。第二个表示每个轴的安装角度,在这些角度上,将行李箱放置在空间中的条件得到满足。第一个转换为第二个,然后在控制器内部正确地返回。如果您意外地确定这绝对是同一回事,而决定使用笛卡尔,则是另一回事。你好
通常,奇异性是铁杆朋友的一种心态,其中电动机沿任一轴的速度将超过相长轴。尚不完全清楚,我将尝试解释。
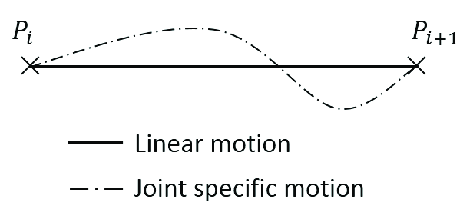
当罗伯特的手从A点移到B点时,他有两种选择。或者-均匀设置所有电动机的速度。在这种情况下,每个特定电动机的速度等于特定轴所需的旋转角度除以执行运动所需的时间。如果选择了此模式,则机器人将在两点之间移动,写出优美的弧线。遗憾的是,在运动过程中,他并不是直线行驶,而是以适合自己的方式行驶。结果,我们有一个难得的机会为产品/墙壁/像他这样的其他东西配备行李箱。
线性运动可确保直线运动。但是同时,电动机需要在不同的时间间隔以不同的速度运行。而现在,如果该速度超过了电动机从绕组中实际挤出的速度,则机器人会写出“奇异点”。就这样。程序停止。
在关节而不是笛卡尔坐标中指定坐标的情况下,情况要好一些。我不太明白为什么控制器对关节中的点的反应与笛卡尔中的反应略有不同-可能是由于将坐标转换为角的逻辑所致。但总的来说,“也许”是机器人技术中的一个魔术短语,它在工作中有很大帮助,并被用作通用车前草。
但是,即使是点之间的线性移动(用角而不是坐标表示)也不能保证这会迫使机器人跟随它们。 Fanuk为此做了特别的指示,而Yaskawa通常说他们的机器人没有发挥奇异性。两种方法都不起作用。使用yaskava-如果您考虑这种现象的实质-似乎是一种绕过物理的尝试。控制面板并没有真正显示“奇异”字样,但同时它告知某些轴上的速度。这与奇异有何不同?没有。粉丝们有一个特别的团队。 WIRSJ,如果我的记忆正确地为我服务(那是很久以前的事,并且没有起作用,所以他们忘记了)。嗯,是。机器人继续驱动。只有在运动过程中,它才会“揉搓坚硬的刷子”,使末端关节运动,这是程序员在打字时所钟爱的-扭转腕部。如果罗伯特手里拿着切刀或激光头,摆动的后果很可笑,但却很恐怖。因此,必须考虑单数。
乙太网路

假设我们想通了这个故事。假设我们找出了记录在funuk关节角处的UP和在Yaskawa中依赖模型的脉冲的细微差别。现在我们需要将程序推送到机器人中。您当然可以带一个闪存驱动器和一个将自豪地将其污染到Robert的工人,但是我们在谈论的是最纯粹的自动化吗?因此,我们需要将程序发送给一个铁朋友。缺少直接内存访问作为一个类,但是,我们不安,留下了FTP之类的东西。看来一切都很酷,连接并开始。但不是。机器人只能是客户。
实际上,使用此功能是为了从企业网络的文件箱中提取一个UE,将其加载到机器人中并执行它。机器人是非常现代的东西,因为其中的内存量以兆字节为单位计算,并且古巴男爵吞下了绝望的眼泪,计算了1字节的成本,并用白色粉末看着孩子们的沙盒。在这种情况下-在罗伯特(Robert)上存储一千个UP将不起作用-内存会说“哦,一切”。而且,如果我们有很多程序,请善于使用遥控器轻松松散地进入文件:只需几分钟,他在Dial-up上加载该程序,便会报告他已准备好工作。
好吧,好吧,如果不能战胜混乱,就必须领导它。我们将要求Robert通过FTP上传文件。他为什么要指定文件名称(好吧,或者总是将具有相同名称的文件放在文件夹中),业务。为此需要什么?为Robert编写一个程序,该程序将在后台等待命令加载并加载程序。然后做。为此,Yaskawa为我们提供了购买开发环境并处理运行用C编写的程序的内部沙箱的方法。就语法而言,这当然是C,但是通过那里的结构,一切并不是那么明显,而且非常薄弱(因为它已经是2年了,因为它已经很旧了)。技术支持在德国,并且不急于提供帮助。
Fanuc还没走很远。您还需要购买开发环境,同时购买选件。在funook中,每次打喷嚏都是一个选择。这种喜悦的清单确实令人印象深刻,并且成本可能导致会计过敏变黄。但是-每个人都可以赚钱。
编写,启动。它甚至可以工作。时代5。然后发誓缺乏内存,因为您的程序很长-真他妈的。三次。我们正在诅咒,我们将完成删除操作的编写。德巴志在某个时刻,Robert停止通过网络进行响应。那为什么呢?而且因为他保持连接并且不知道如何重新连接。服务器变慢了吗?请重启食物。放一个断点? Dosviduli,食物重新启动。在我们的工作过程中,我们从来没有找到过从罗伯特那边恢复连接的方法,而the啪作响的开关声对于每个调试会话都是an告。
经过调试,完成并抹去了劳动的汗水?罗伯特(Robert)就位,准备好锉刀,切刀正在运转并在预期中磨齿?万岁 你确定吗?
准确性

指定点坐标的精度为千分之一毫米。罗伯特可以走一百平方米的精度。假设地。正负。但是仍然令人印象深刻!但是这个准确性是多少?
此准确性与可重复性有关。罗伯特到达太空某点的再发生是十万次。但是,如果您突然决定将罗伯特移动1000毫米,那将不是1000毫米。不在生活中。至少是罗伯特的正常值,而不是机翼飞机的值。为什么?
事实是罗伯特内部有一个虚拟模型。他不知道像终结者一样如何在颅骨内部的显示器上查看自己的胆量,但是他使用这组数字来表征每个关节的尺寸,从而将笛卡尔坐标转换为关节。实际上,对于罗伯特来说,笛卡尔坐标只是一个未知的游戏,其名称为“纯抽象”。控制器内部的驾驶员所能做的只是以一定角度转动Robert的6台电动机中的每一个。为了将笛卡尔坐标转换为关节,使用了非常常量来表示关节的大小。在工厂里,他们倾倒,磨砺并看到了未来人类压迫者的细节,那里也有宽容。现在想象一下,其中一个关节的尺寸位移(例如0.5毫米)会带来什么样的误差。
因此,事实证明,控制器可以正确地考虑所有内容,但是基于不准确的数据。在仪表的飞轮上,我们打算将1.5 mm的孔扩展为一个全新的,从未使用过的壁扇形钩。甚至还有一些特别的人来,并通过在整个可达区域内使用测量设备进行复杂的游乐,制作校正表,或者-他们在罗伯特的内脏中校正这些值。同样,在经典应用中,这不是必须的-操作员将机器人带到几个点,检查了精度,并要求他在接下来的5年中重复这一操作。错误在这里不起作用-不管您投入多少,机器人都会在离开工厂后立即失去增长的能力。为了弯曲一块铁的几何形状,需要将其摇晃一下……我认为在这样的载荷之后,它原则上不能工作。但是我们需要这个问题必须解决。
反馈
...完全不存在。如果您想向罗伯特询问他当前的坐标,电动机的位置或可执行程序的行,那么长尾小鸟到了并且高兴地暗示继续吸烟手册和学习编程会很好。这是必要的-写。
我不介意-但我似乎不想收到罗伯特的护照和公寓钥匙。这似乎是标准的事情。尽管总的来说,我可能并不了解这些限制背后的逻辑,这些逻辑将以太网变成了单向网桥-这很可能与安全性有关。
我决定是这样
另一个
此外,没有明确的模式-有时从-185到+180可以正确驱动,有时从-165到+175可能会以错误的方向起飞。为什么该死的优化尚不清楚,但必须通过插入将轴设置为零的点来编写程序。并且,根据技术流程,如果将其调高±180,然后加上±90,因为否则它将沿着最短的路径再次爆炸。与第四轴和第六轴有关。
萨满教

系统管理员有手鼓吗?他们很虚弱!机器人驾驶员不会出现在铁片的表面上,除非撒上圣水,没有将自己垂在鸡和兔子的腿上,没有将水牛头骨戴在头上,也没有从十几只马蹄铁上放下烧aki。
我不再对“七个麻烦-重置一次”的规则感到惊讶。我已经很喜欢这种开关了,一只狗。对于“为什么”和“因为”答案,我并不感到惊讶。但是有些事情还在继续进行。例如,使用焊接跟踪系统进行校准,然后罗伯特可以开始向侧面行驶。或无法扩展的备份。或注释“下一个%CrapName%已经起飞”。或绝对随机工作的本机路径圆角。这已成为常态。
而不是结论
我不会要求将我的话评价为抱怨。就像“哦,和他们住在一起有多困难”。尽管有这些怪癖,但这些非常有趣的动物还是很有趣的。突破文件记载薄弱的荆棘,抢夺看似标准的事物的奇迹,只说一件事-在开发罗伯特时,这些问题并未得到应有的重视。总体而言,您每天使用的东西效果很好。
新技术的出现将不可避免地导致罗伯茨对开发人员变得更加友好的事实,而目前的手鼓跳舞将逐渐成为过去。但是,它们的变化没有我们所希望的快。在保守主义方面,它们在鲨鱼进化之前飞奔,但跟不上英国议会改革的步伐。您只需要等待,今天-学习绕过这些烦人的限制和可爱的怪癖。
下次我们将讨论进入该行业的门槛,然后我们将考虑在.NET上从CAD系统导入模型的实现功能。或-表面扫描的细微差别。全部-以一个立方体的船为例。我们必须剪掉它。