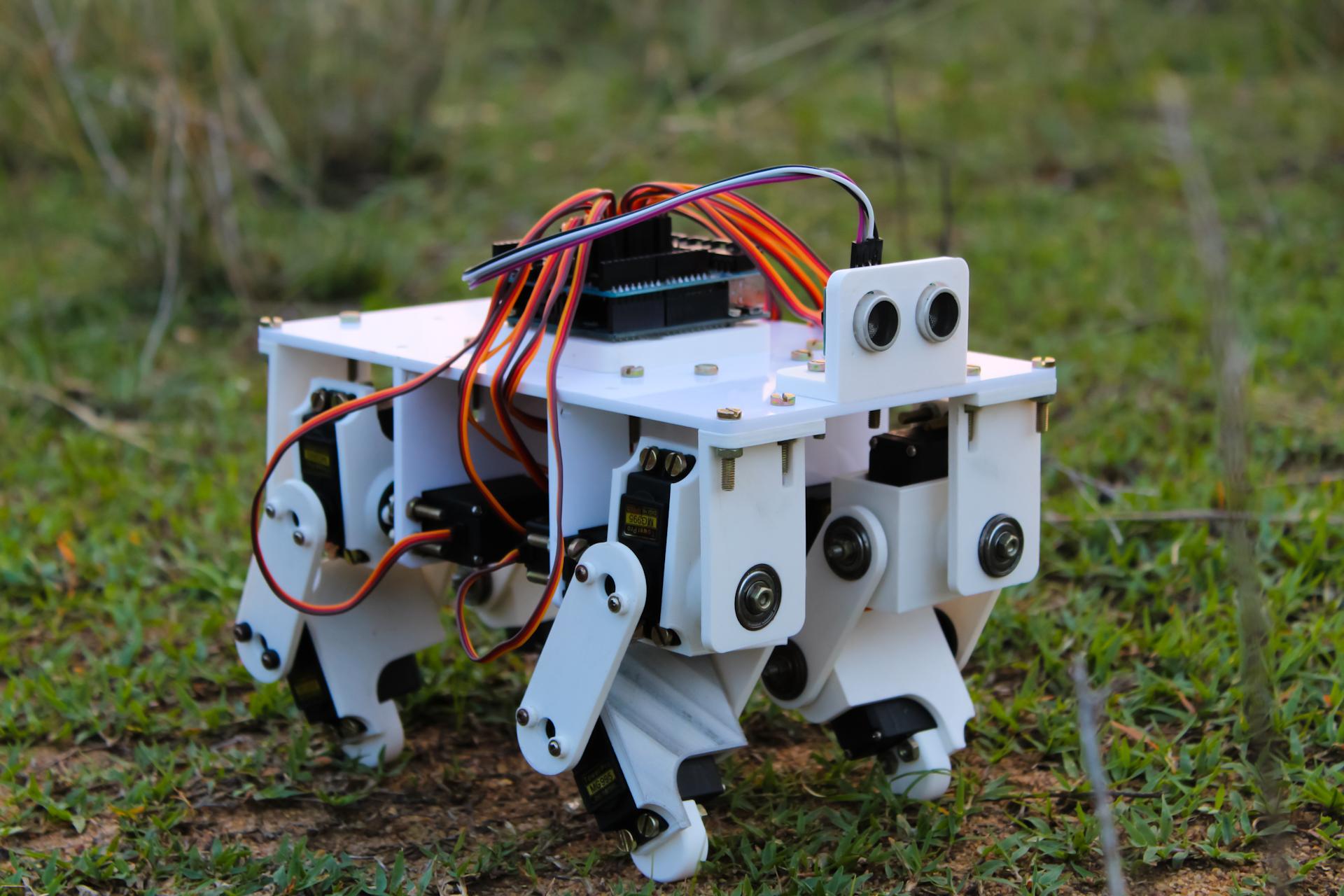
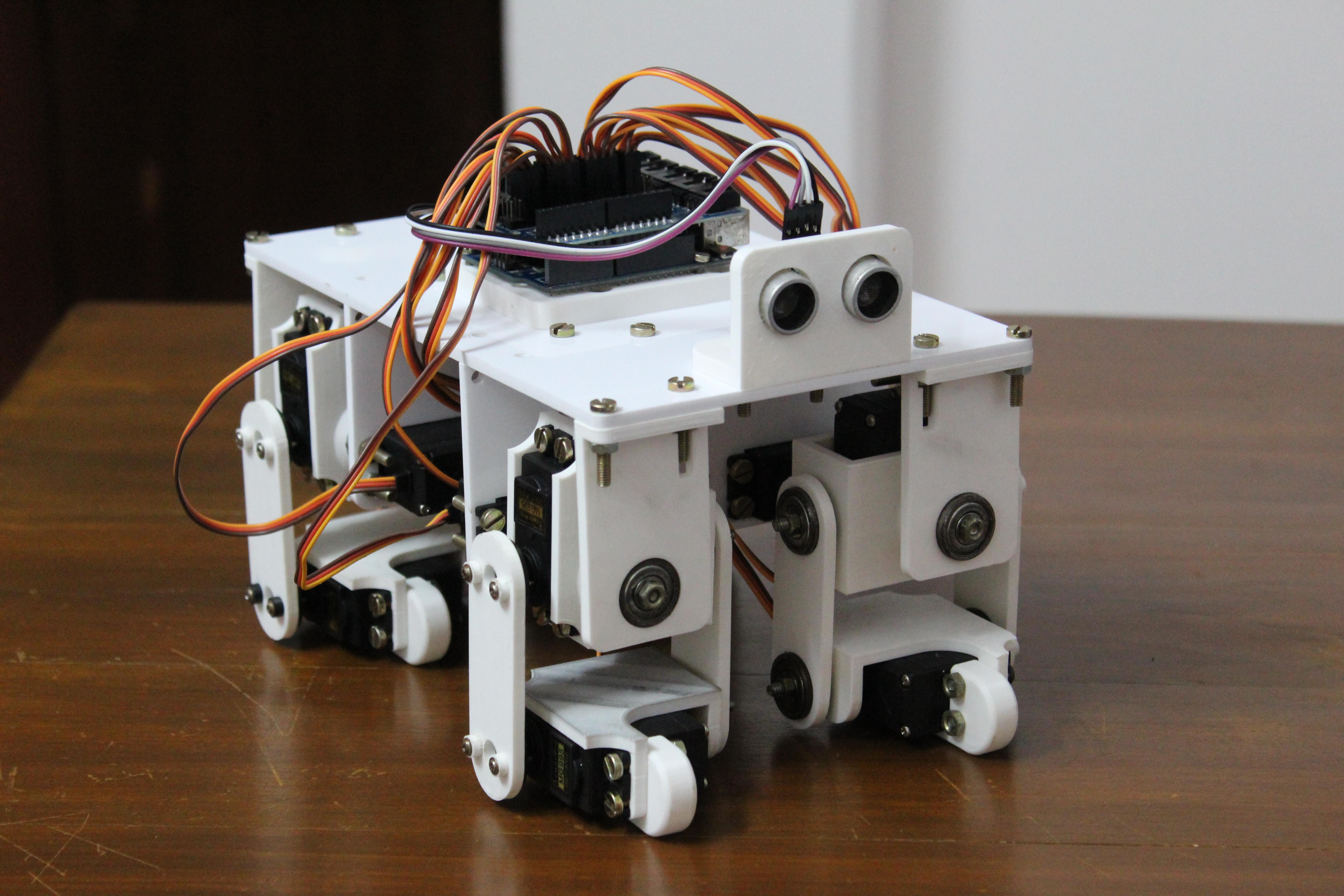
我对机器人很感兴趣,最近又造了一个由Arduino驱动的双足机器人。之后,我想制造一个四足机器人,模仿狗或猫等动物。在本文中,我将讨论设计和组装四足机器人。
该项目的主要目标是使系统足够可靠,以便在以不同步态进行实验时,我不必担心可能出现的设备故障。这使我可以将机器人推到极限,使其具有复杂的步态和不同的动作。另一个目标是使用现成的组件和3D打印技术制作相对便宜的原型,以进行快速原型制作。这两个目标共同为各种实验和开发具有更具体目标(导航,避障,动态运动适应)的更专业的四足机器人奠定了坚实的基础。
步骤1:一般资料和设计流程
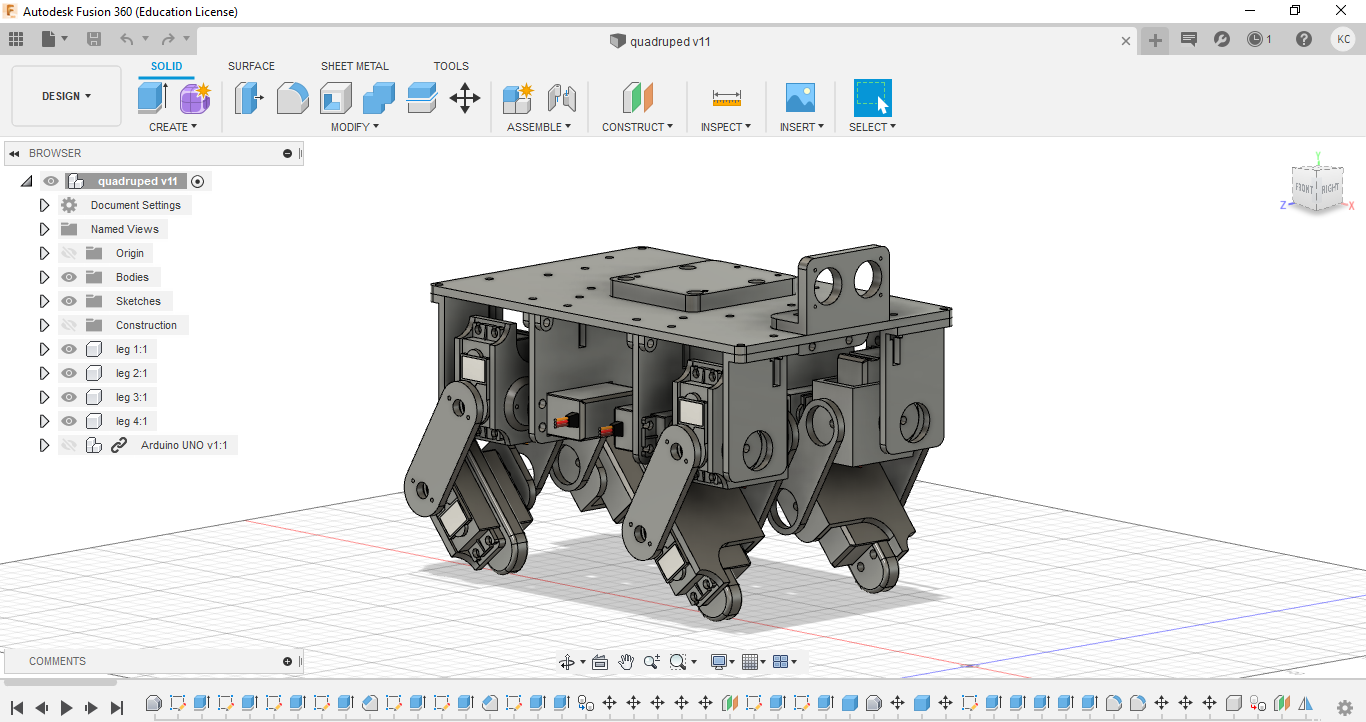
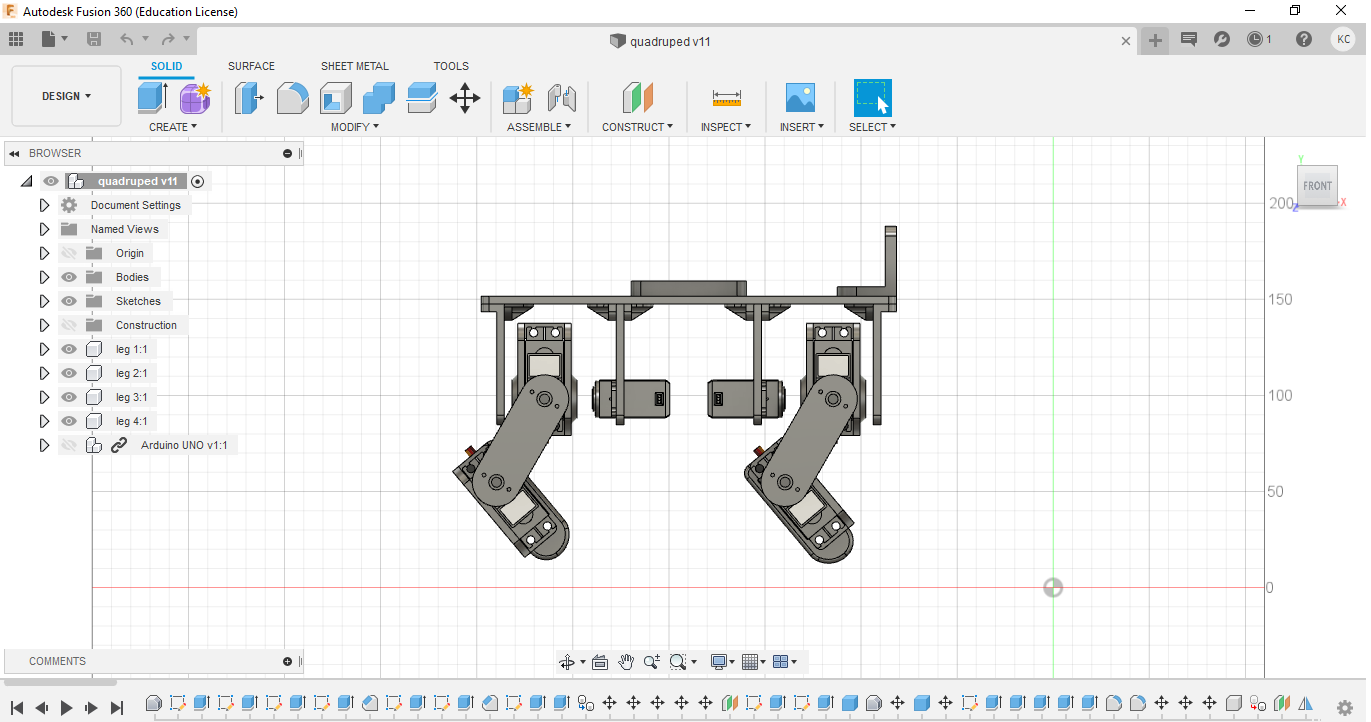
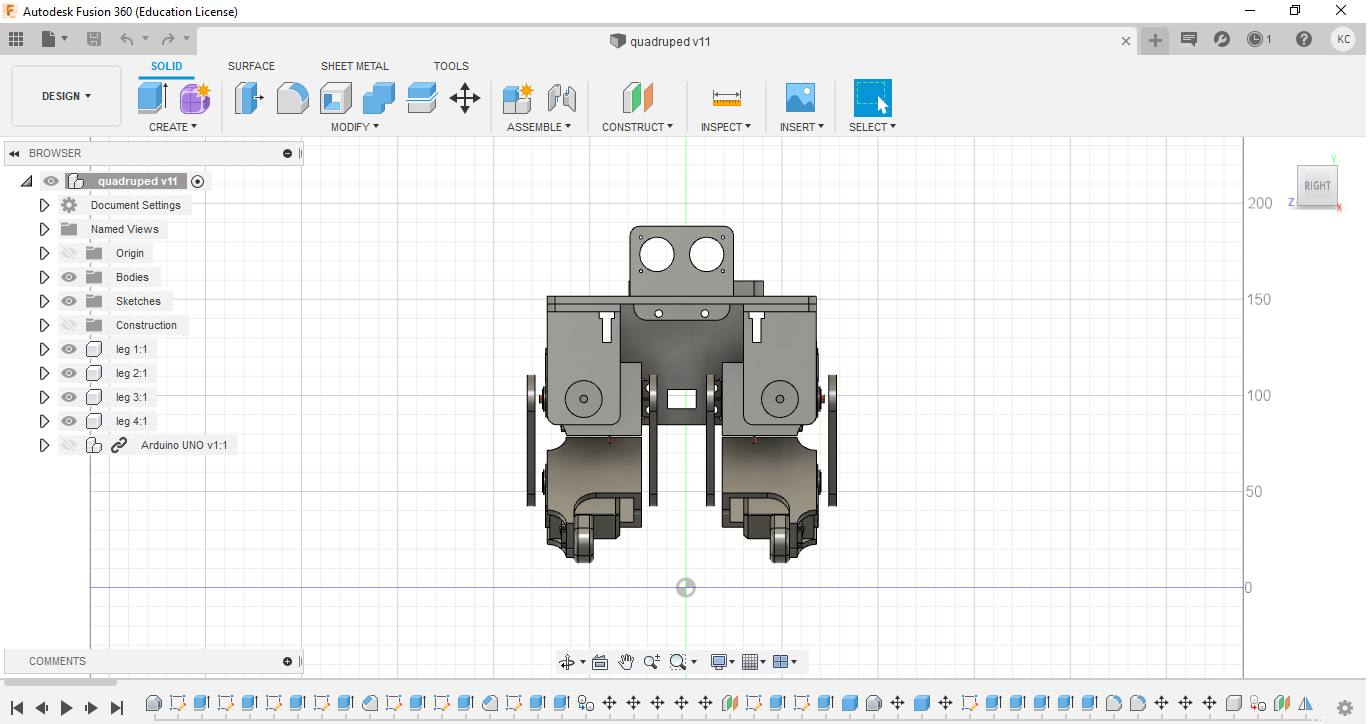
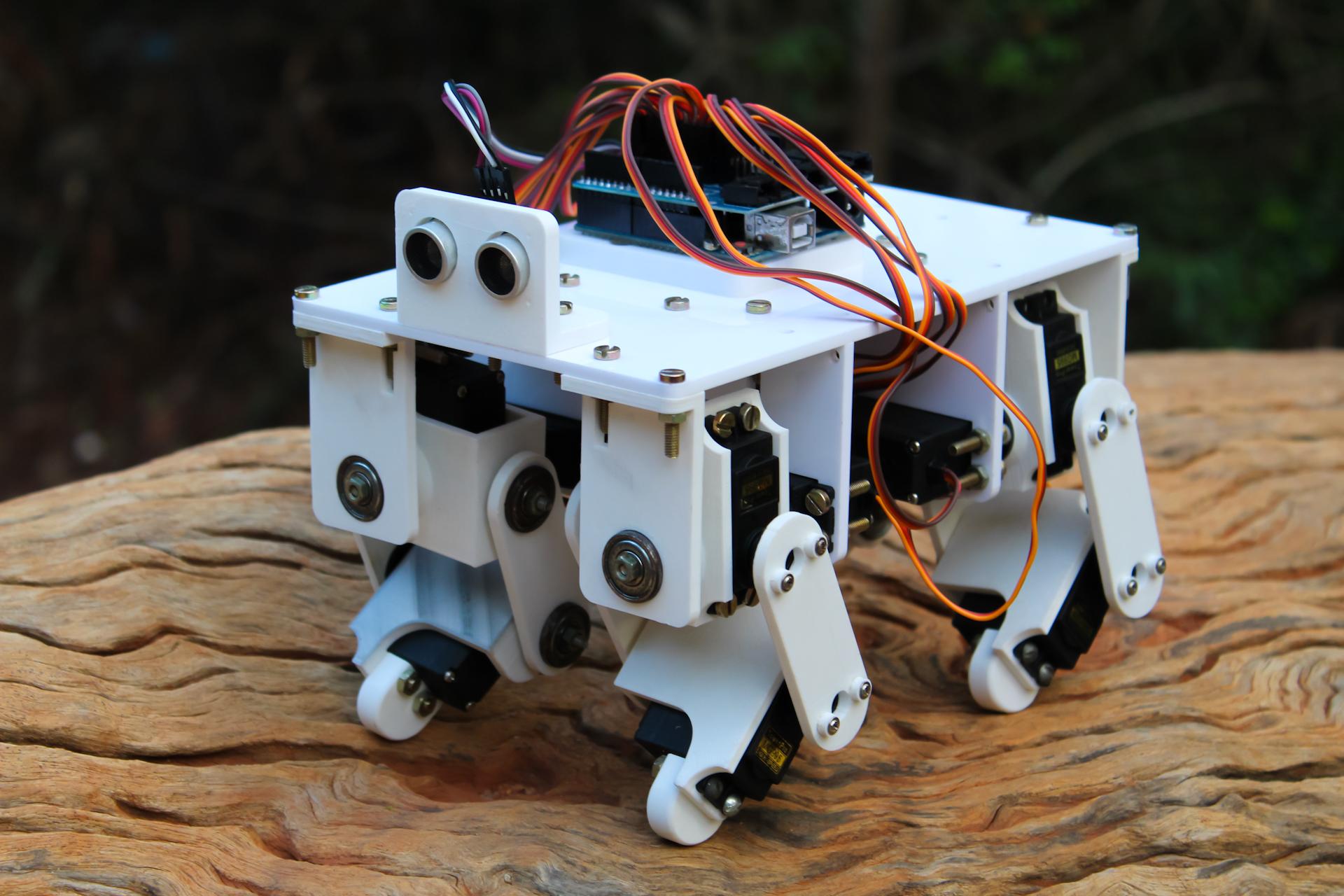
我使用来自Autodesk-Fusion 360的免费3D建模软件开发了该机器人。首先,我导入了伺服电机,并在该电机周围画出了腿部和躯干。然后,我设计了电机固定支架,为它们提供了第二个固定点,该固定点与轴完全相反。电机两侧的轴赋予了结构强度,并消除了腿部加载时歪斜的可能性。将轴承插入特殊的支架中,并使用螺栓作为支架中的轴。用螺母将支架固定到轴上之后,轴承在伺服电机与轴相反的一侧提供了一个固定的枢轴点。
开发过程中的另一个目标是使模型尽可能紧凑,以最大程度地利用伺服电机的转矩。臂的尺寸可提供最大的移动性和最小的长度。如果我将它们设置得太短,括号将相互碰撞,从而降低了灵活性。如果做得太长,电机将不得不施加不必要的扭矩。最后但并非最不重要的一点是,我设计了带有Arduino和其他电子组件附件的机器人箱。我在面板顶部提供了更多的安装座,以扩展将来的项目。有一天,有可能为机器人增加距离传感器,摄像机或其他机械装置,例如抓爪。
步骤2:所需的材料
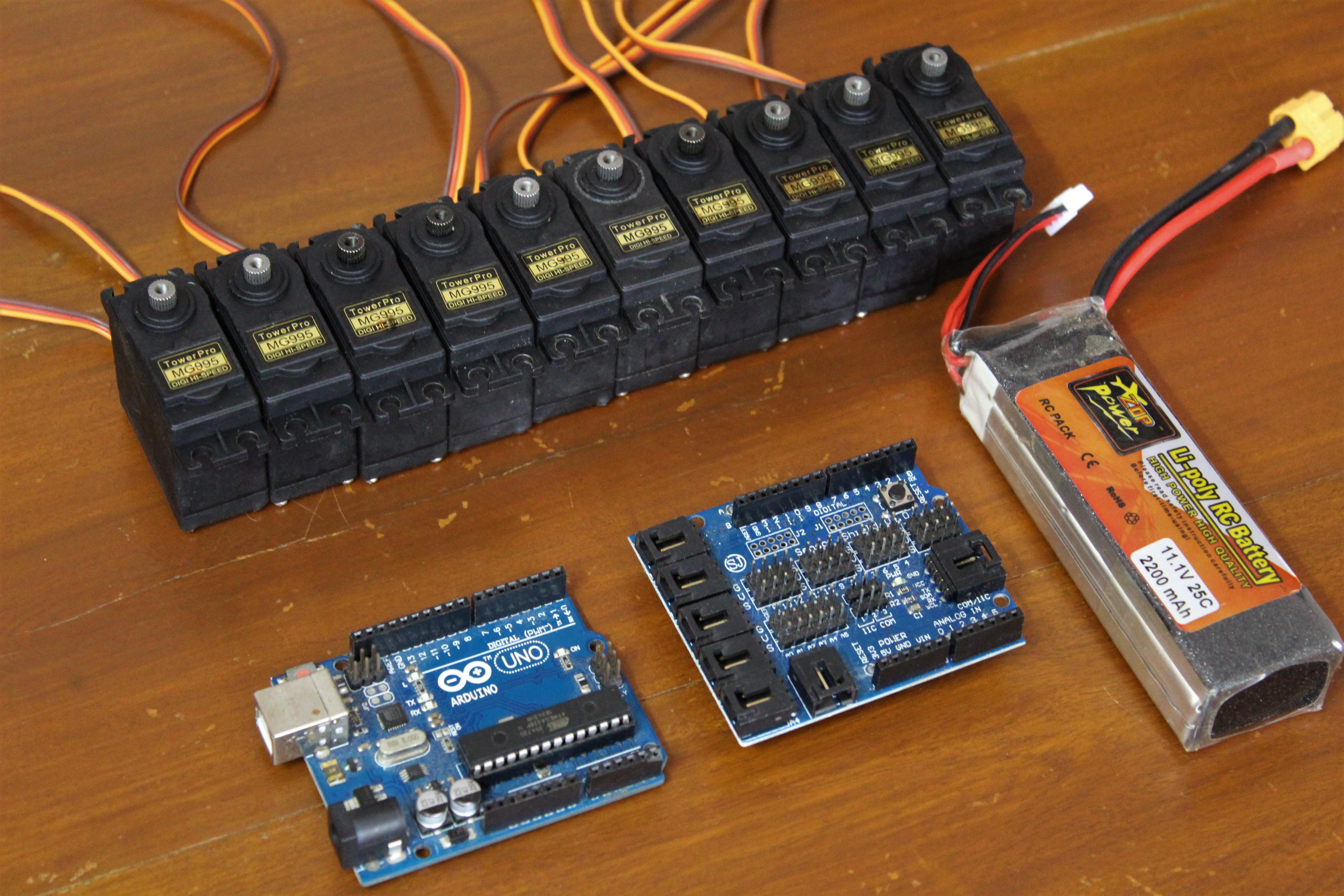

创建自己的由Arduino控制的四足机器人所需的材料清单。所有组件都是通用且可用的。
电子产品:
- Arduino Uno x 1。
- Towerpro MG995伺服电机x 12。
- Arduino Sensor Shield(我有版本4,但我建议购买版本5)。
- 连接线,10条。
- MPU6050 IMU(可选)。
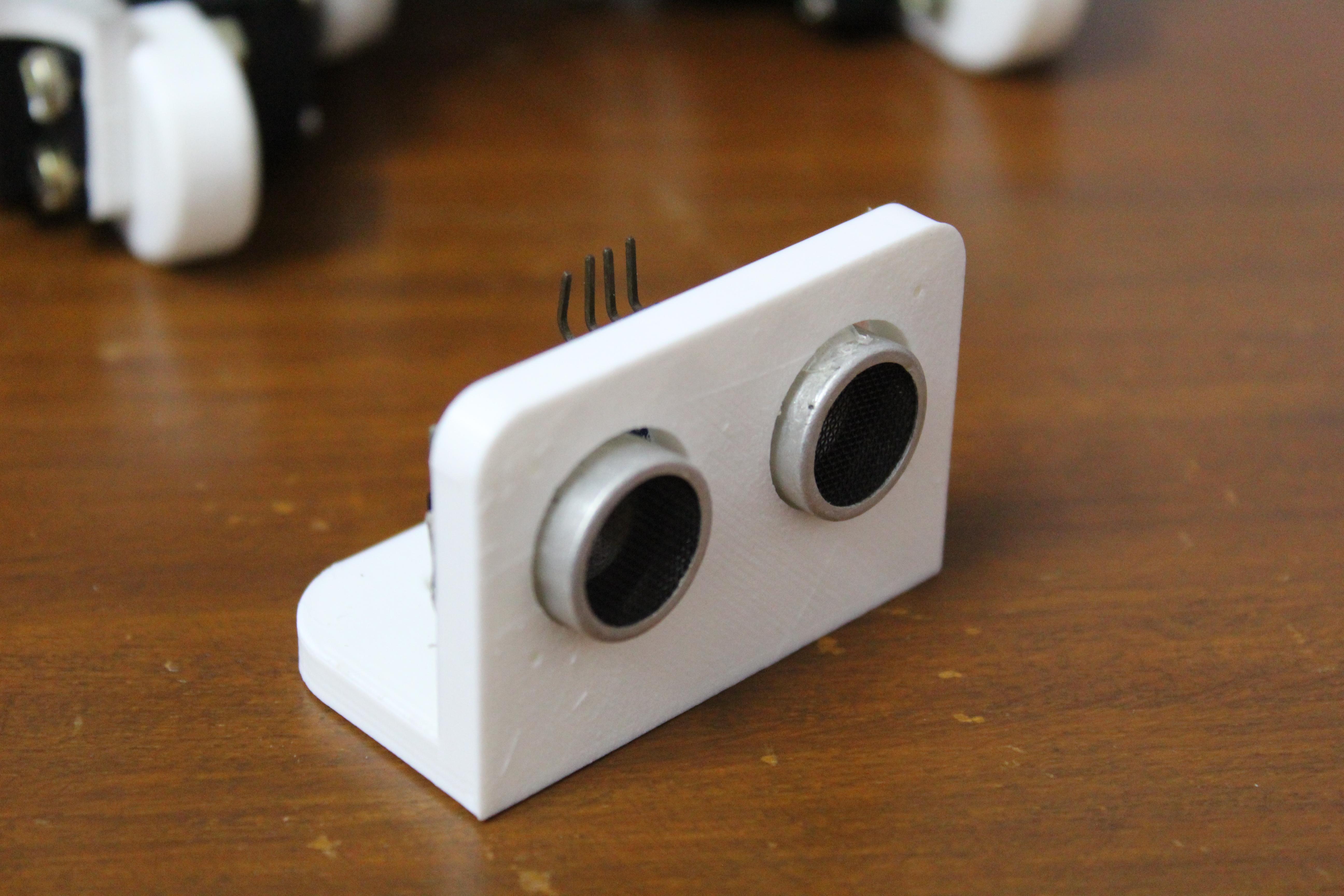
- 超声波距离传感器(可选)。
组件:
- 轴承(8x19x7 mm,12个)
- 螺栓和螺母M4。
- 3D打印机的塑料。
- 有机玻璃4毫米。
工具类
- 3D打印机。
- 激光切割机。
大部分浪费都花在12台伺服电机上。我仍然建议不要使用便宜的塑料马达,因为它们容易损坏。除了这些工具外,所有这些加起来总共花了我60美元。
步骤3:印刷组件
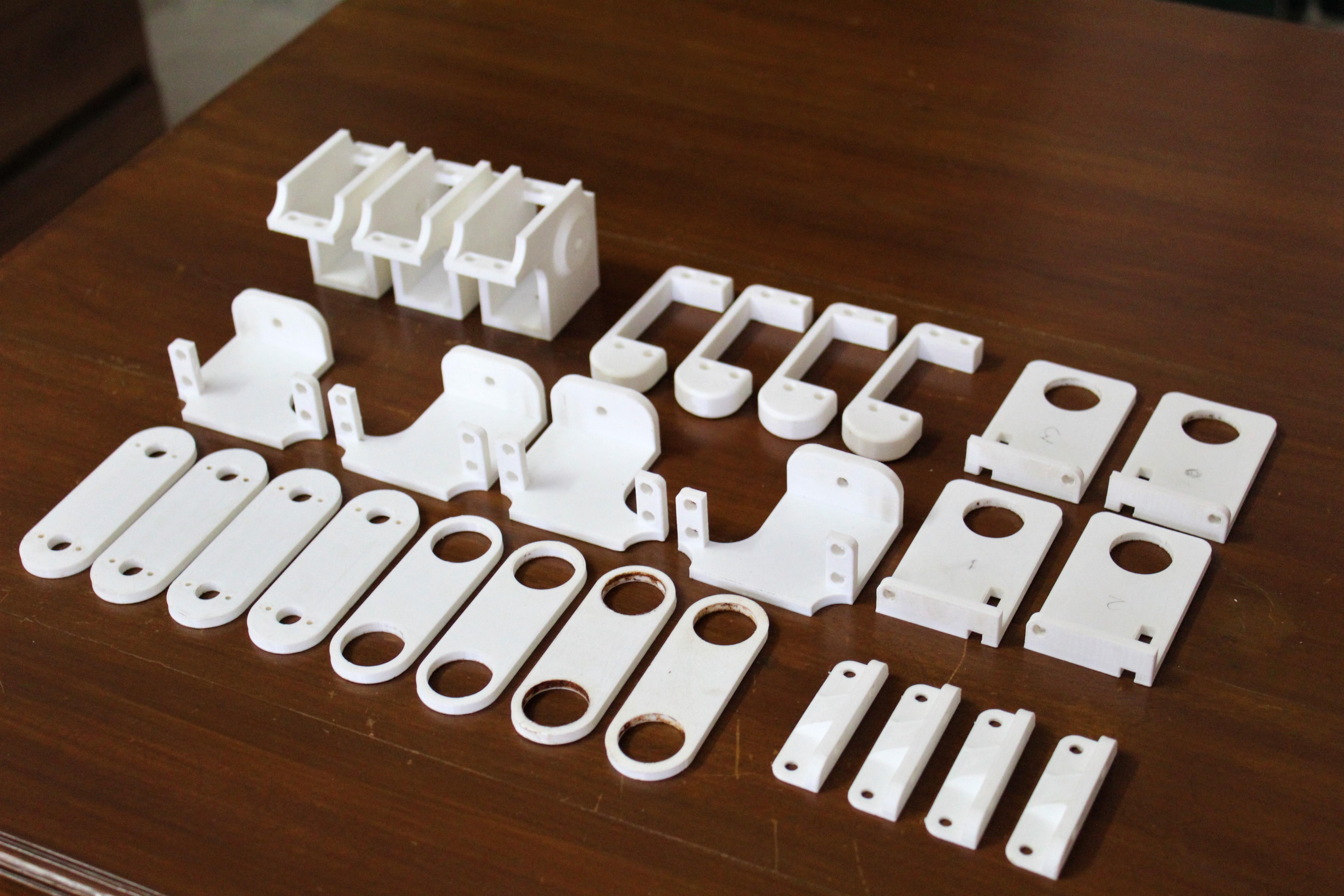

机器人的组件必须专门开发-为此,我们利用了数字设计和CAD功能。大多数组件都是3D打印的,有些是我们从4mm有机玻璃板上切割下来的。使用PLA进行40%覆盖率,2周长,0.4毫米喷嘴,0.1毫米层高的印刷。一些组件由于其复杂的形状和悬垂的零件而需要支撑,但是它们易于接近且易于使用钢丝钳拆卸。您可以根据自己的口味选择颜色。以下是用于打印的组件和STL链接以及切纸器的2D工程图的列表。
3D打印组件:
- 股骨伺服电机支架x 2。
- 股骨伺服电机镜支架x 2。
- 膝盖伺服电机支架x 2。
- 后视镜伺服马达膝盖支架x 2。
- 轴承座x 2。
- 后视镜支架x 2。
- 腿x 4。
- 伺服电机支架x 4。
- 轴承座x 4。
- Arduino硬件x 1。
- 距离传感器支架x 1。
- 角扣x 4。
- 轴承套x 4。
- 伺服洗衣机x 24。
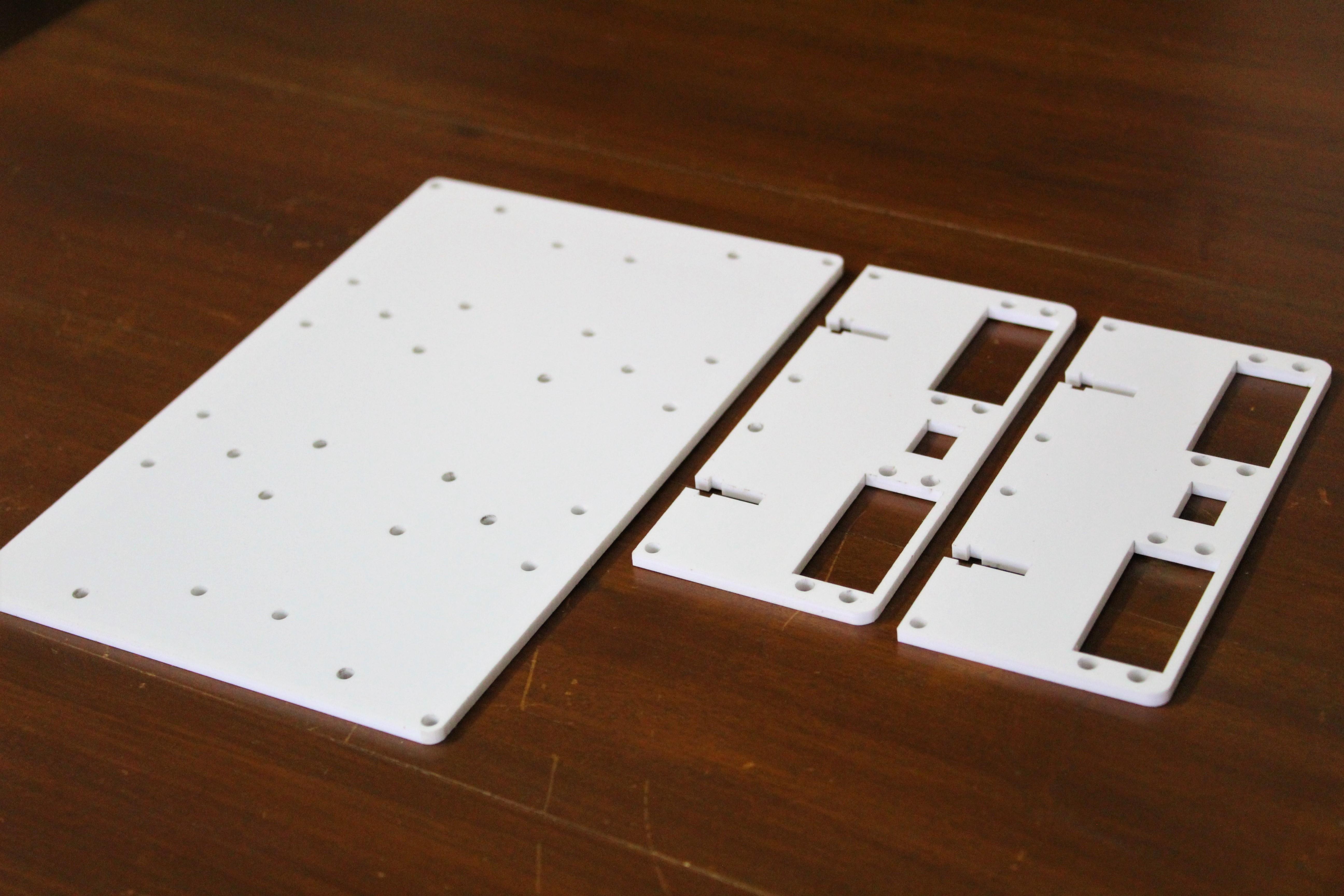
激光切割组件:
- 伺服安装面板x 2。
- 顶板x 1。
除各种垫圈外,总共需要打印30个零件,而数字化生产的零件总数为33个。我在30个小时内完成了所有打印。
content.instructables.com/ORIG/FBK/9YPN/KFZEKVED/FBK9YPNKFZEKVED.rar
content.instructables.com/ORIG/FZS/65E0/KFZEKVEE/FZS65E0KFZEKVEE.pdf
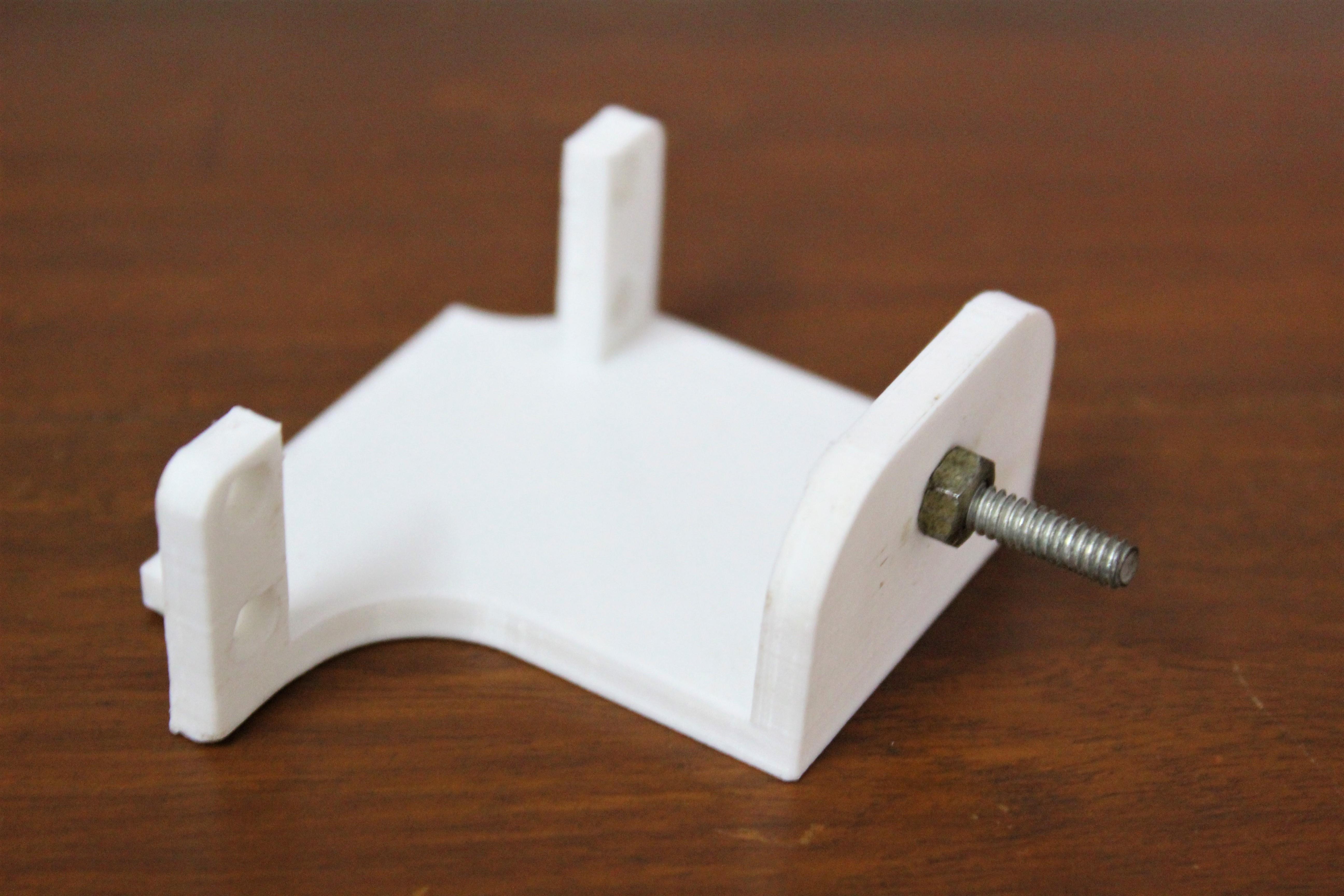
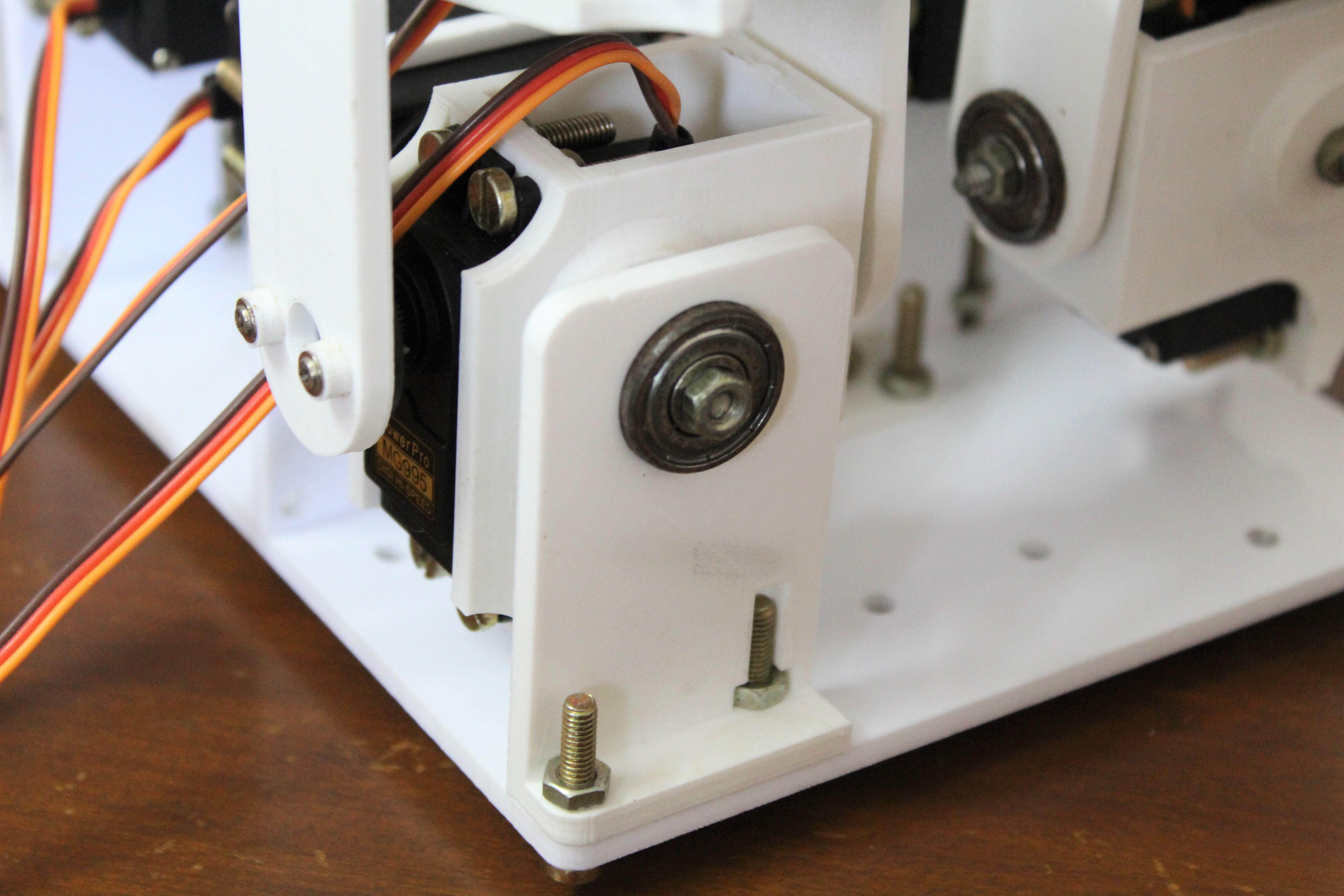
步骤4:准备轴承座



如果您开始组装某些组件,那么整个过程将会更快。您可以从支架开始。为此,请先用砂纸打磨支架内部的孔,然后将轴承平齐地插入其中。我必须3D打印一些垫圈,因为电动机随附的螺栓太长,在运行过程中会撞到电动机。
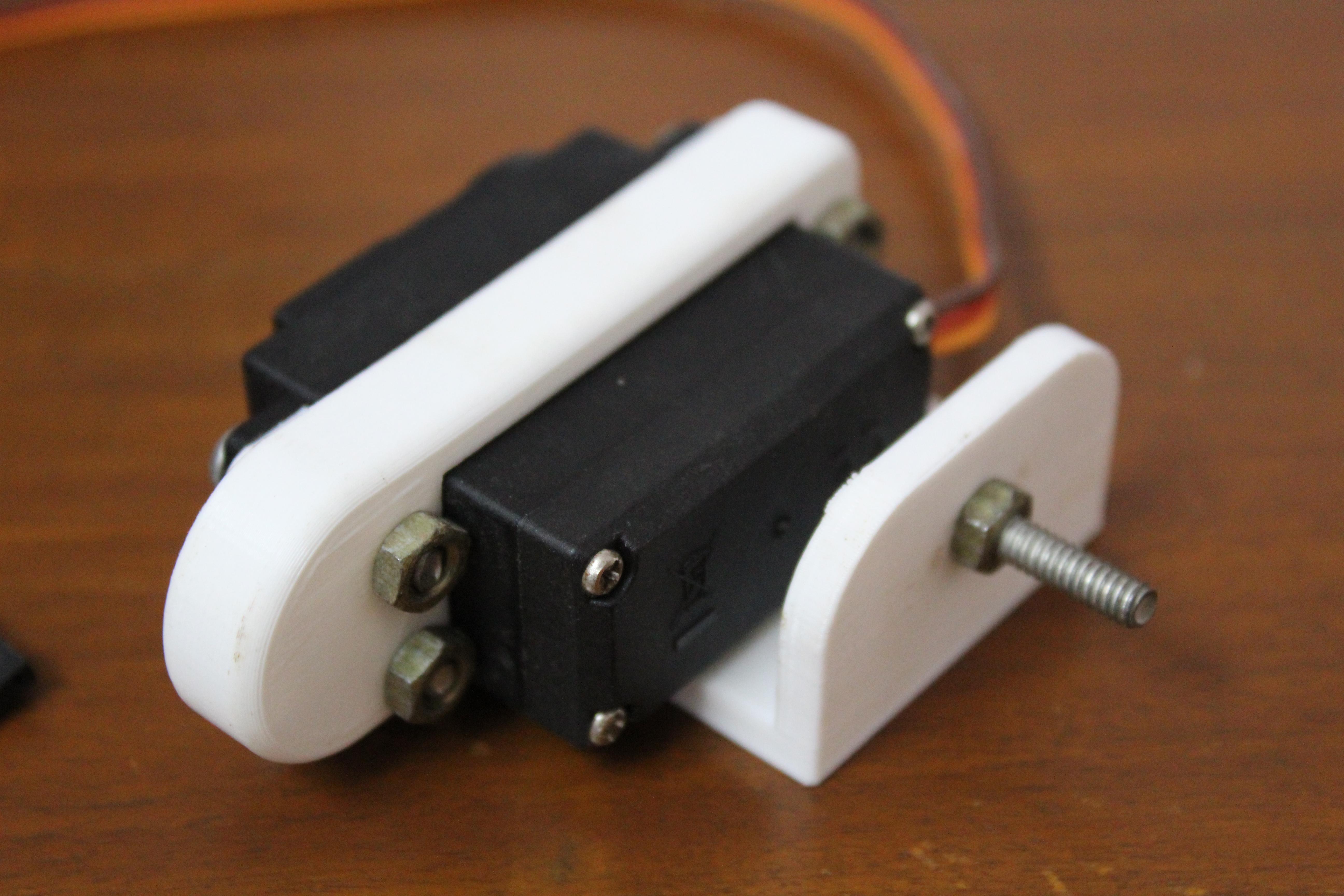
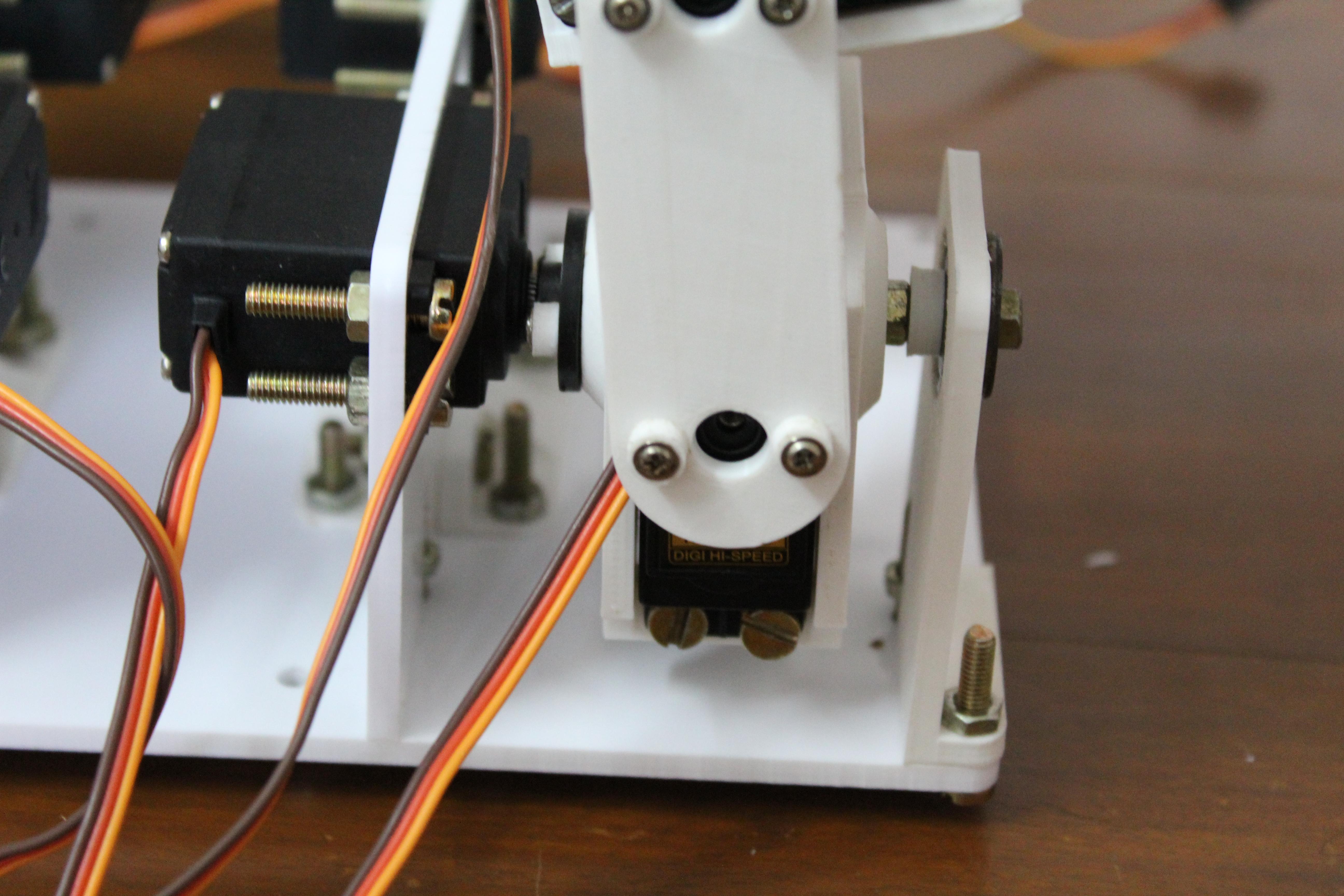
步骤5:准备伺服电机支架


要组装护膝,只需将螺栓插入孔中并用螺母拧紧即可。该关节将作为电动机的第二轴。将两个螺栓穿过大腿支架上的孔,然后拧紧螺母。然后取下弯曲的伺服支架,并用两个螺母将其固定在支架的凸起部分上。最后,取下轴承套并将轴承插入其中。您可能需要稍微打磨套筒的内表面。随附的照片显示了不同的组装步骤。
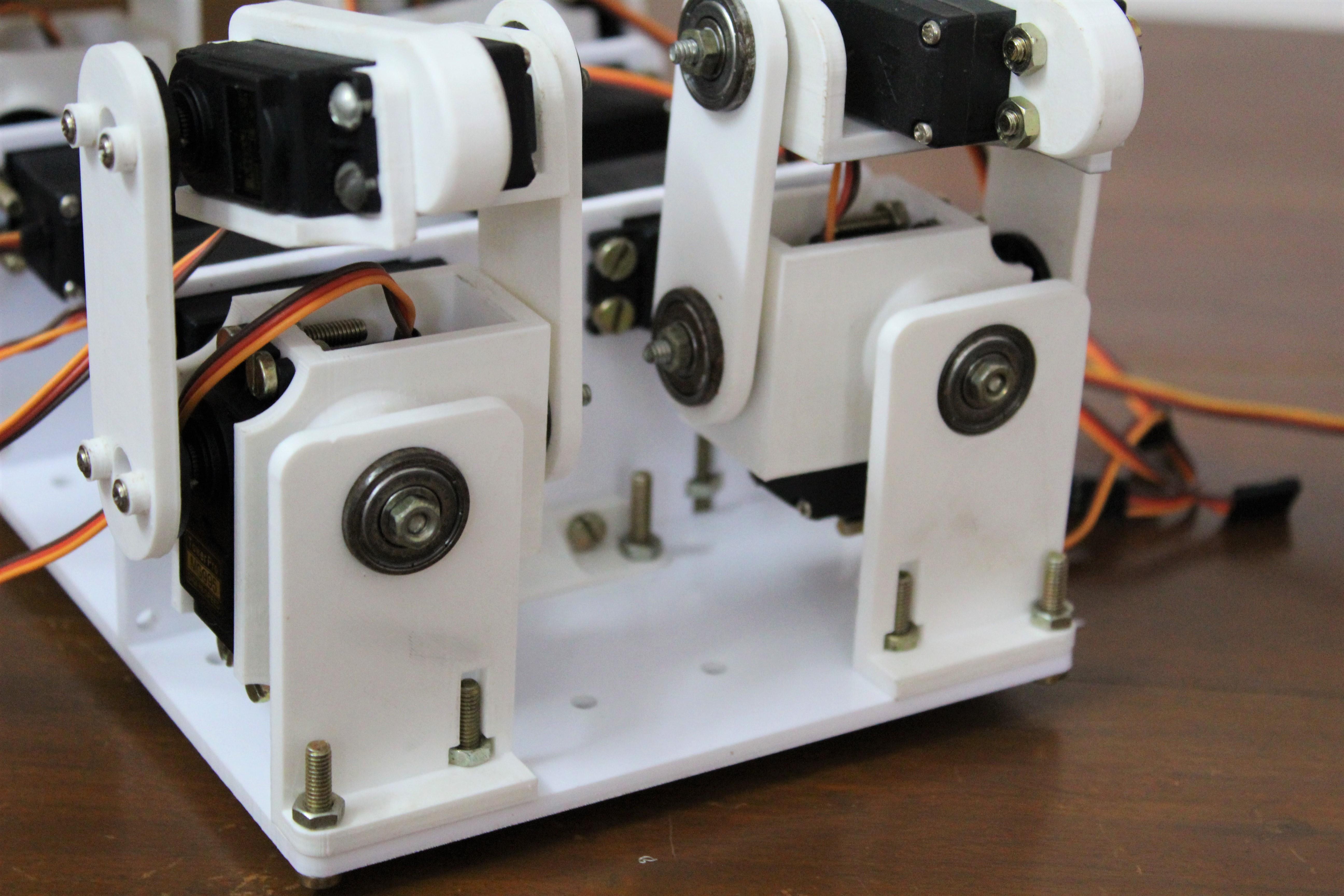
步骤6:组装脚

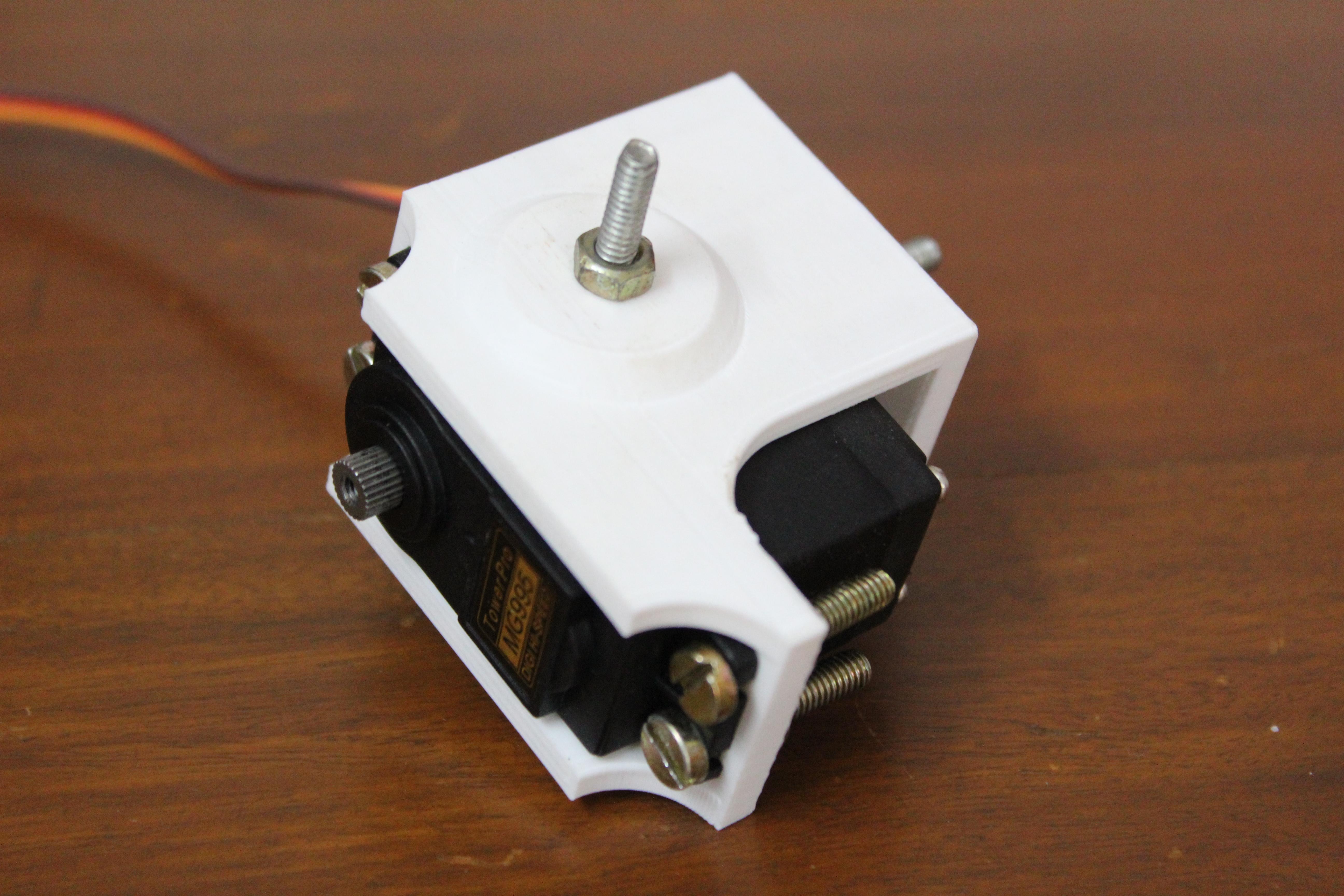

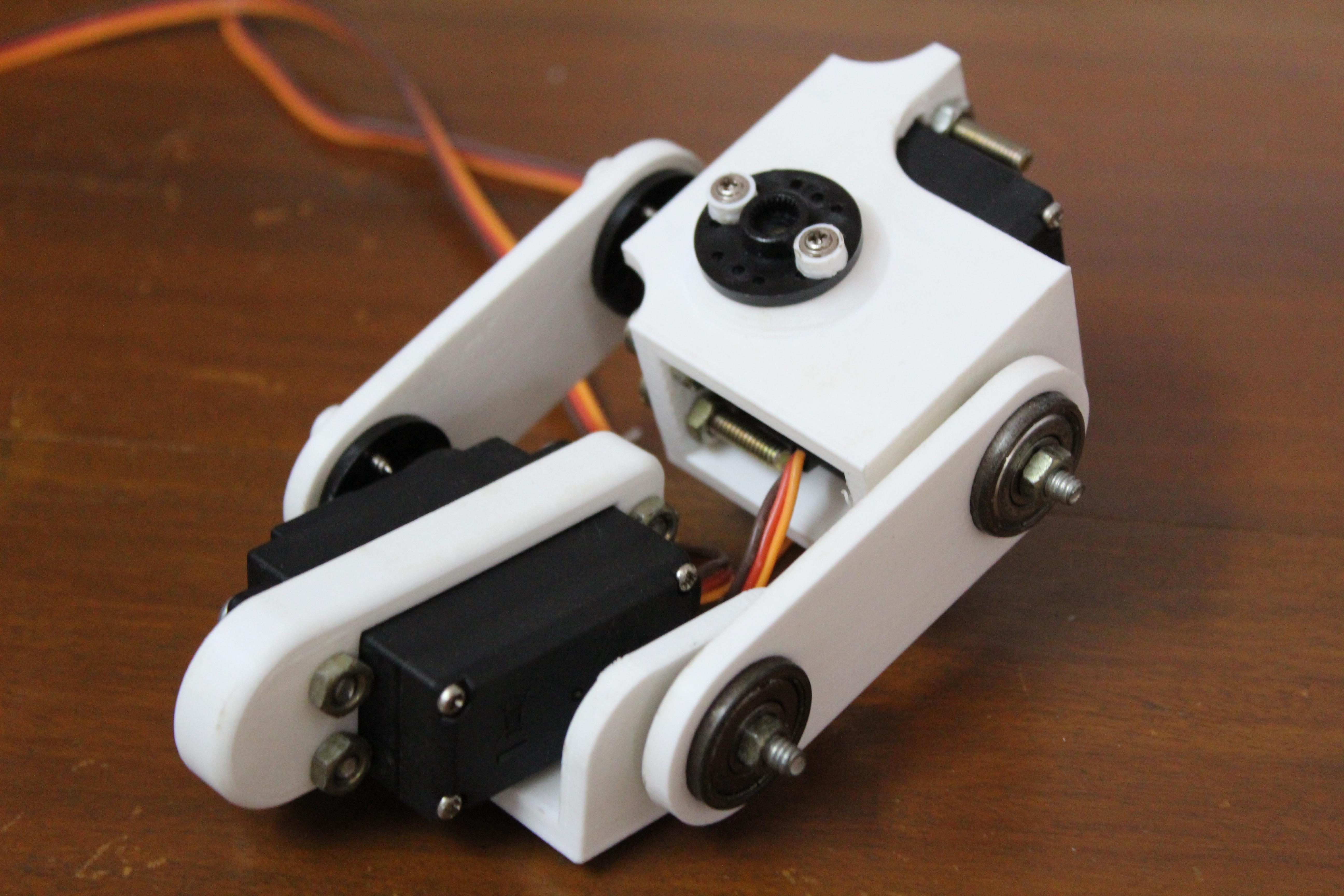
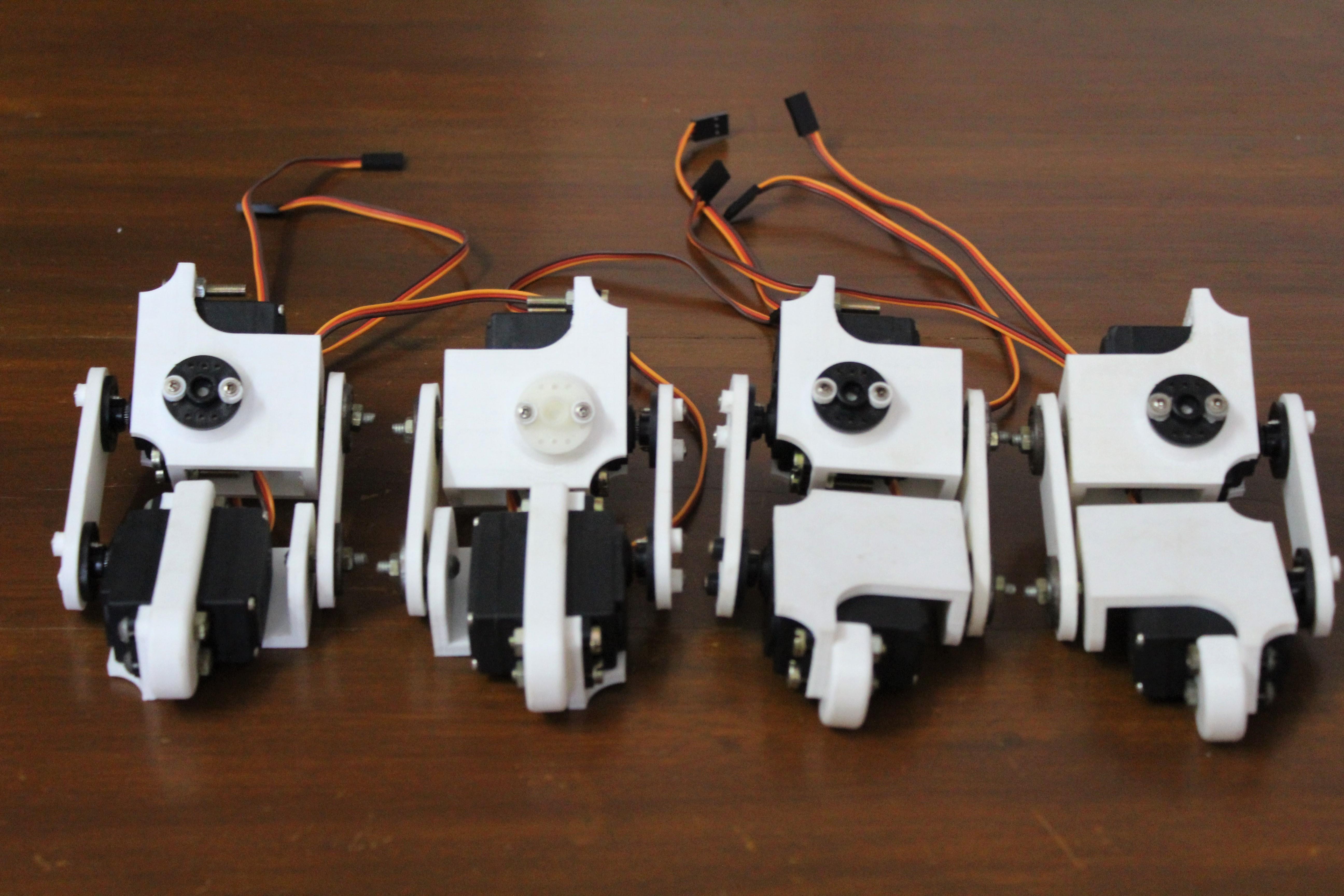
组装完所有订书钉和固定器后,就可以开始组装脚了。首先用螺钉和螺母将伺服电机拧到支架上。将电机轴与从另一侧伸出的螺栓对齐。
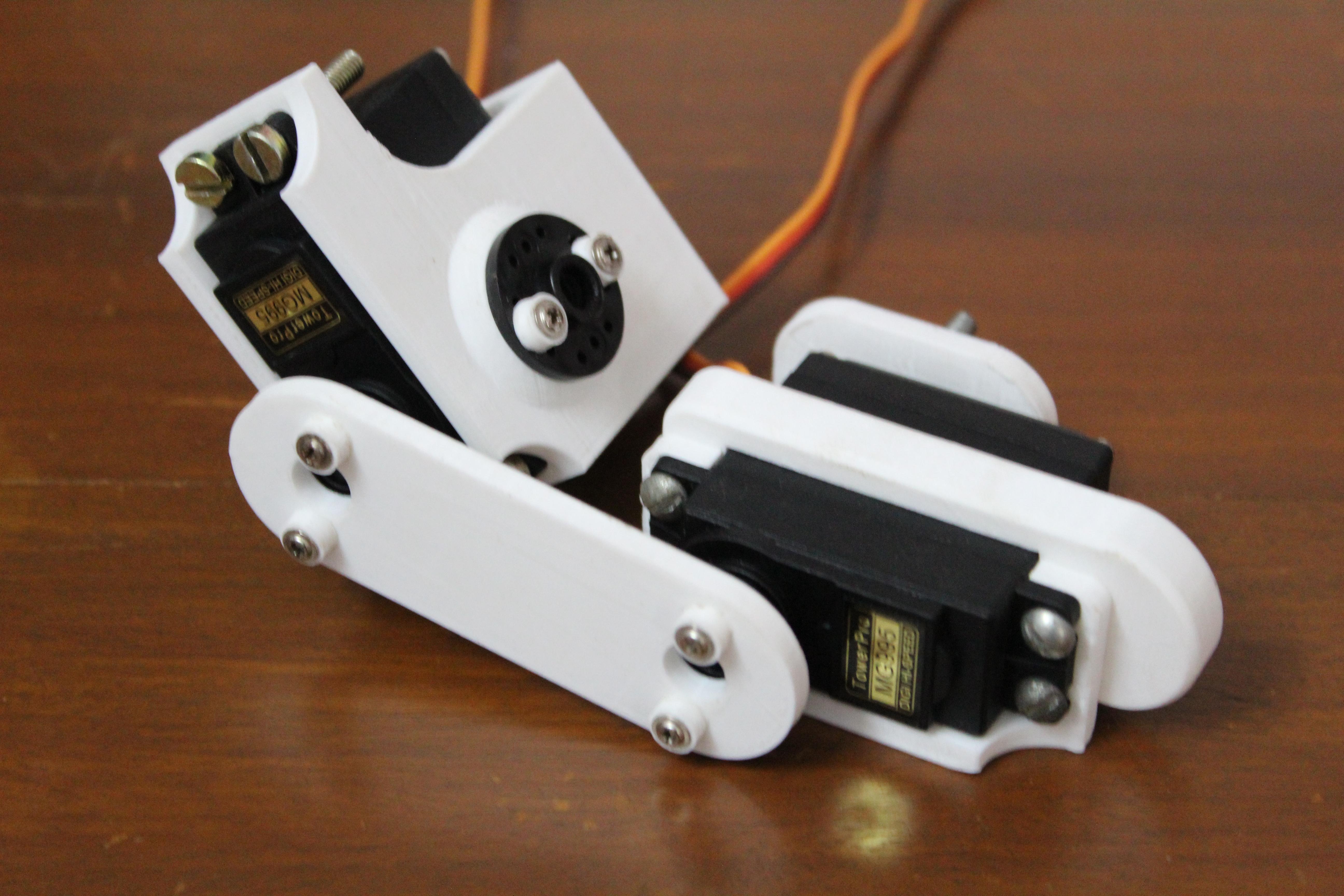
然后用支架将大腿伺服电机连接到膝盖伺服电机。暂时不要拧紧螺母-稍后可能需要修剪一些东西。在另一侧,用两个轴承将支架固定到带螺母的突出螺栓上。
这样收集所有四个腿。
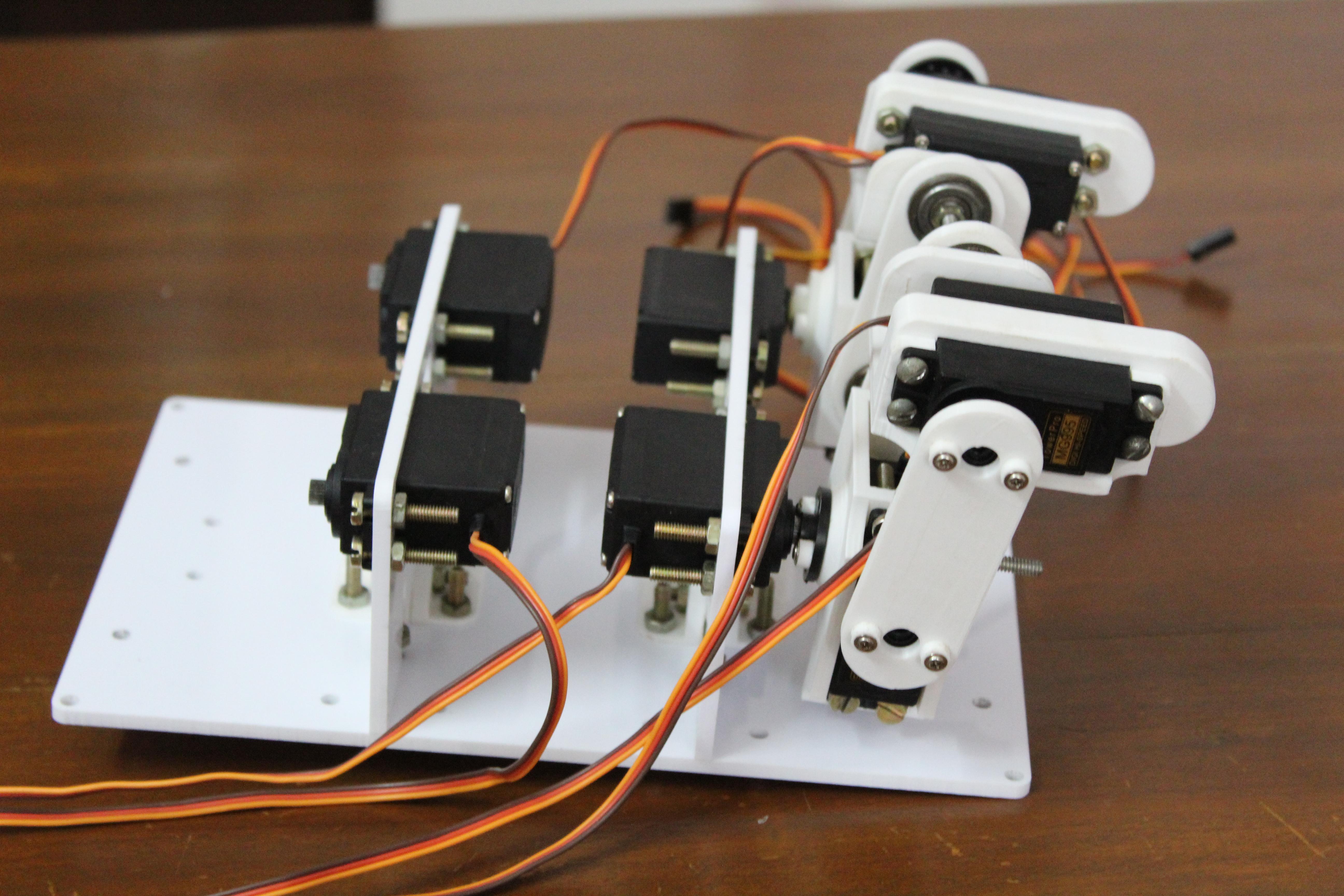
第7步:组装躯干
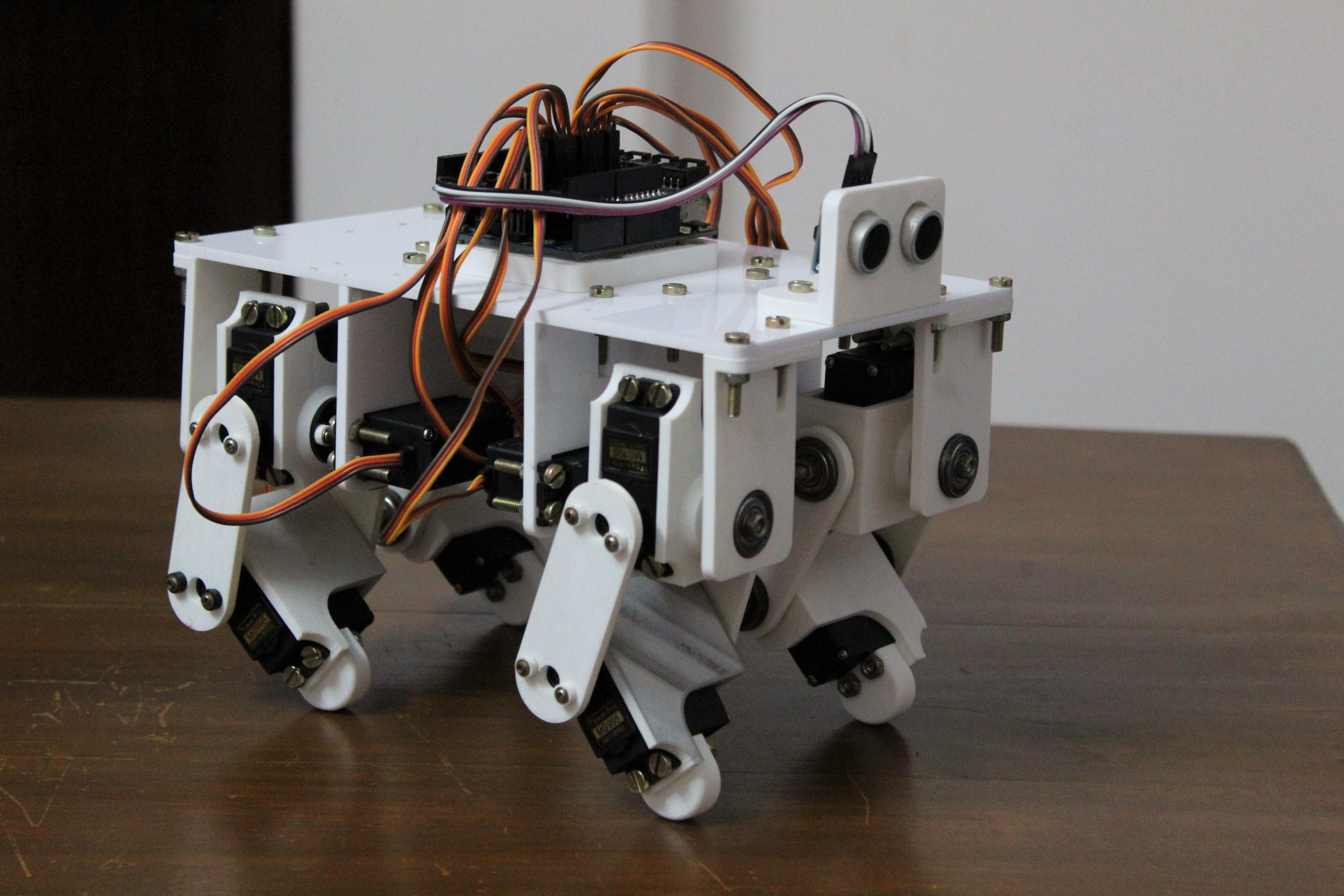
现在您可以开始组装躯干了。它包含四个伺服电机,可提供第三种腿部自由度。首先使用4个M4螺栓将电动机固定到激光切割面板上。
安装伺服电机,使轴指向外部-参见照片。
然后用螺栓固定面板两侧的角支架。它们有助于将电动机安装面板牢固地连接到顶部面板。
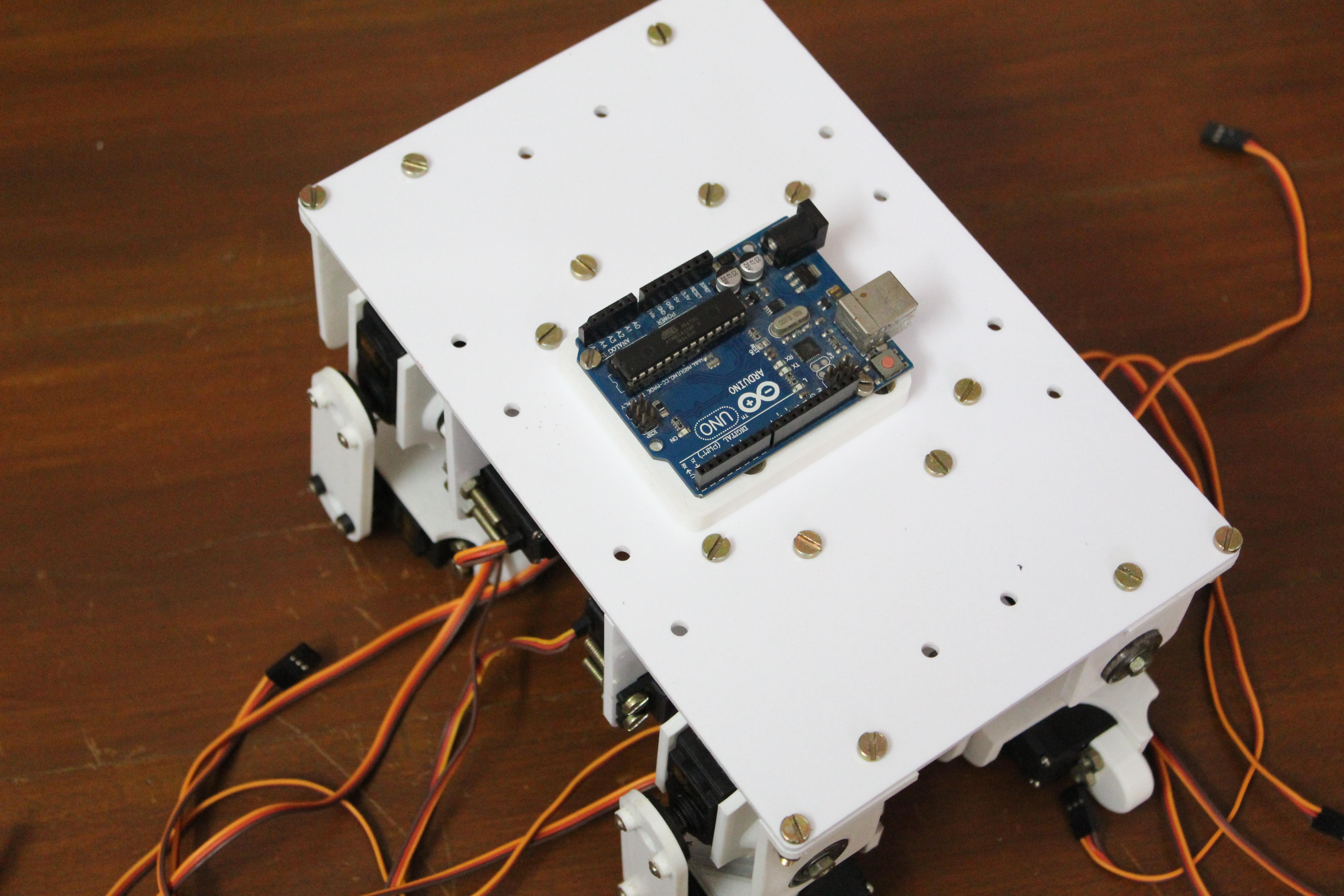
固定好所有支架后,将电动机面板固定到顶部面板上。从位于前后的外部螺栓开始。中间的螺栓可同时固定Arduino支架。请参阅本节开头的照片。将Arduino面板连接到顶部面板,使螺栓穿过角括号中的孔。
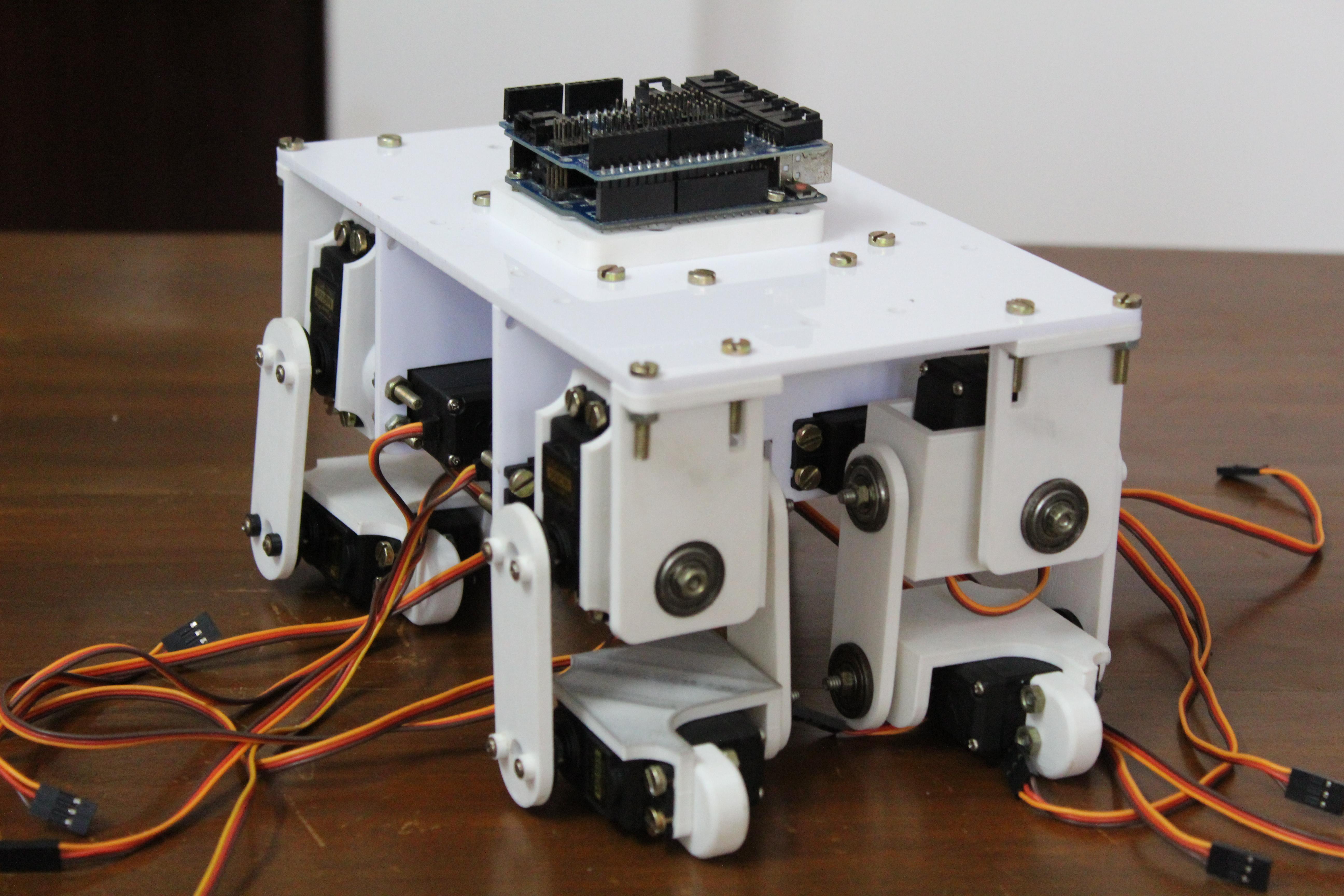
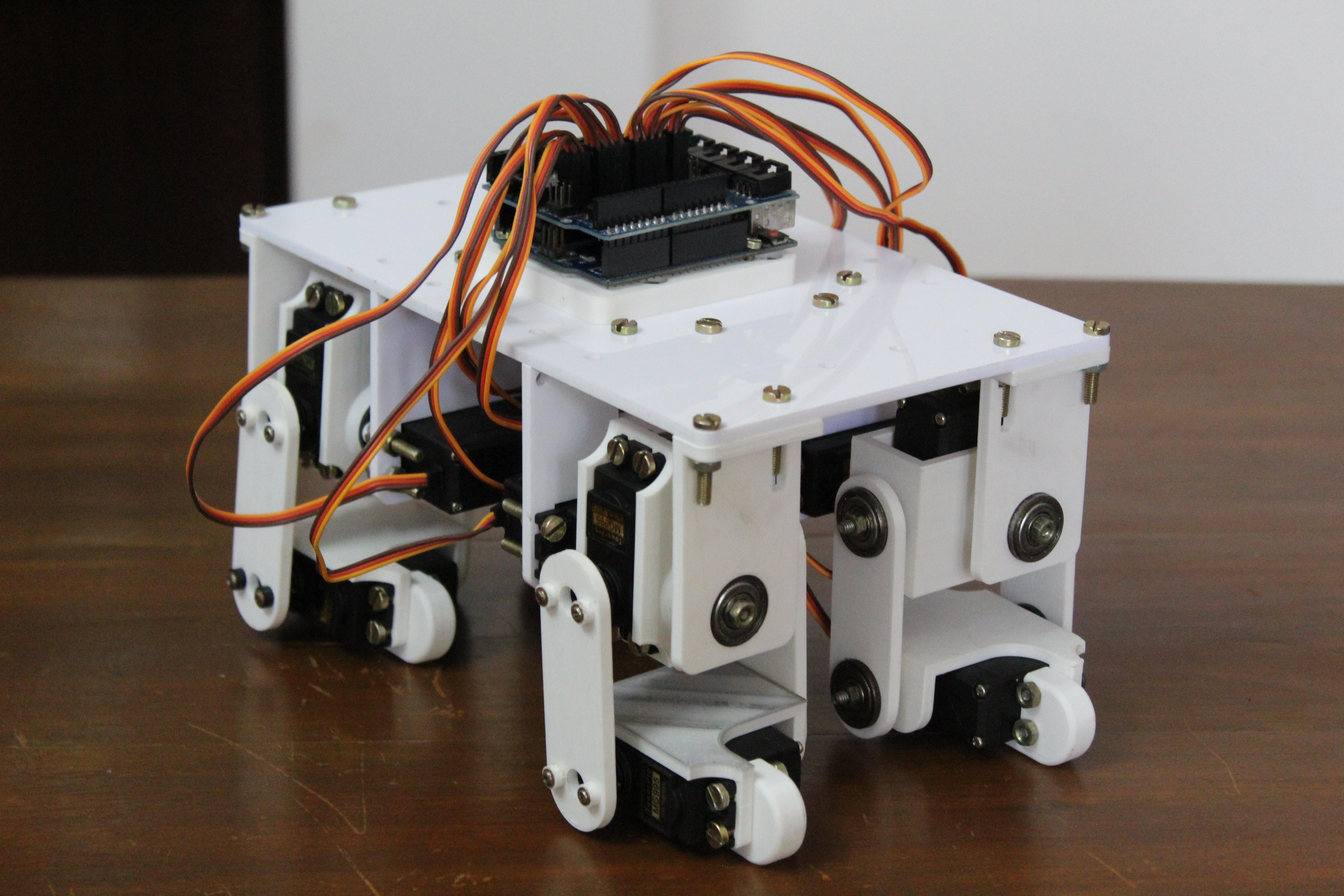
步骤8:将所有内容放在一起

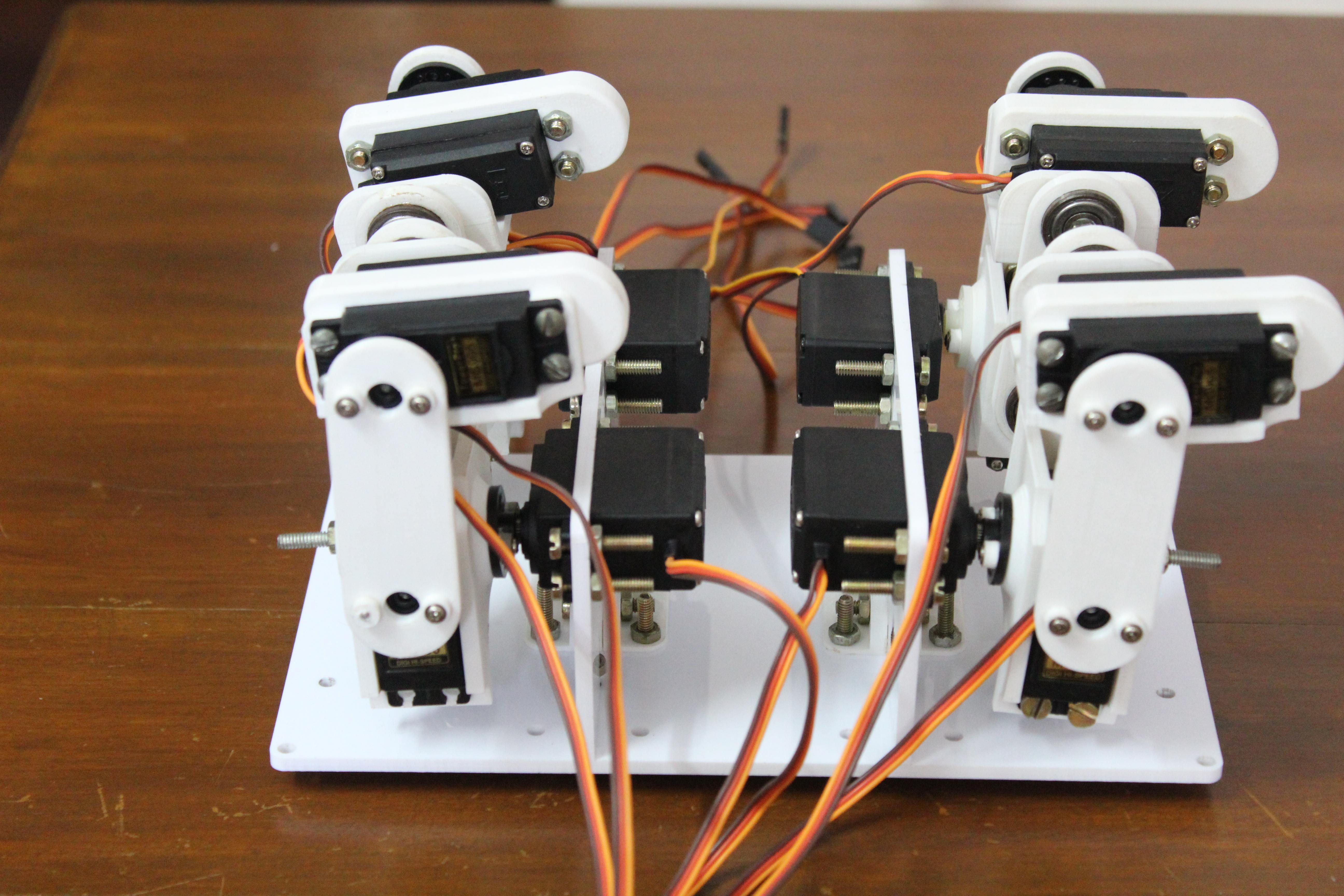

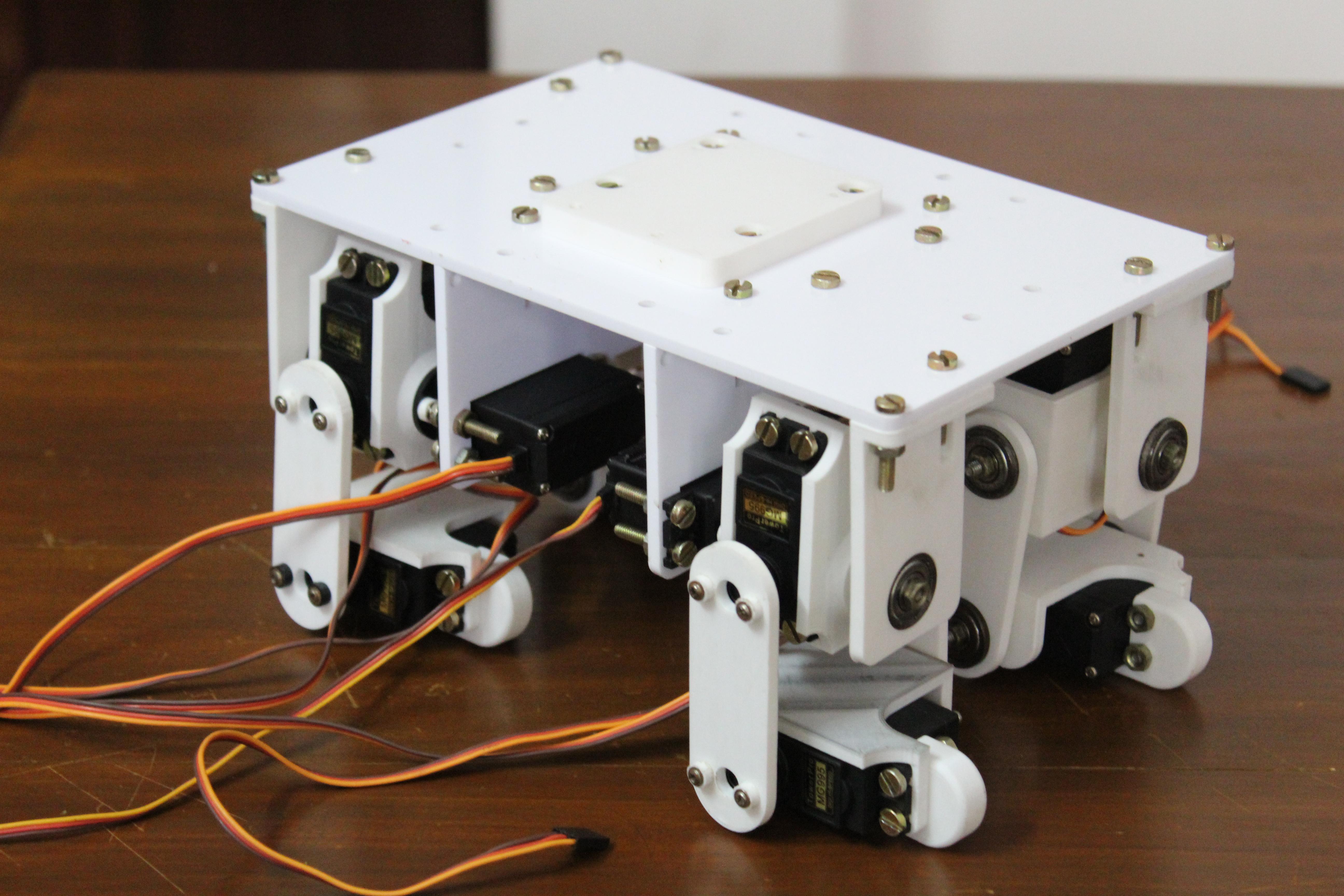
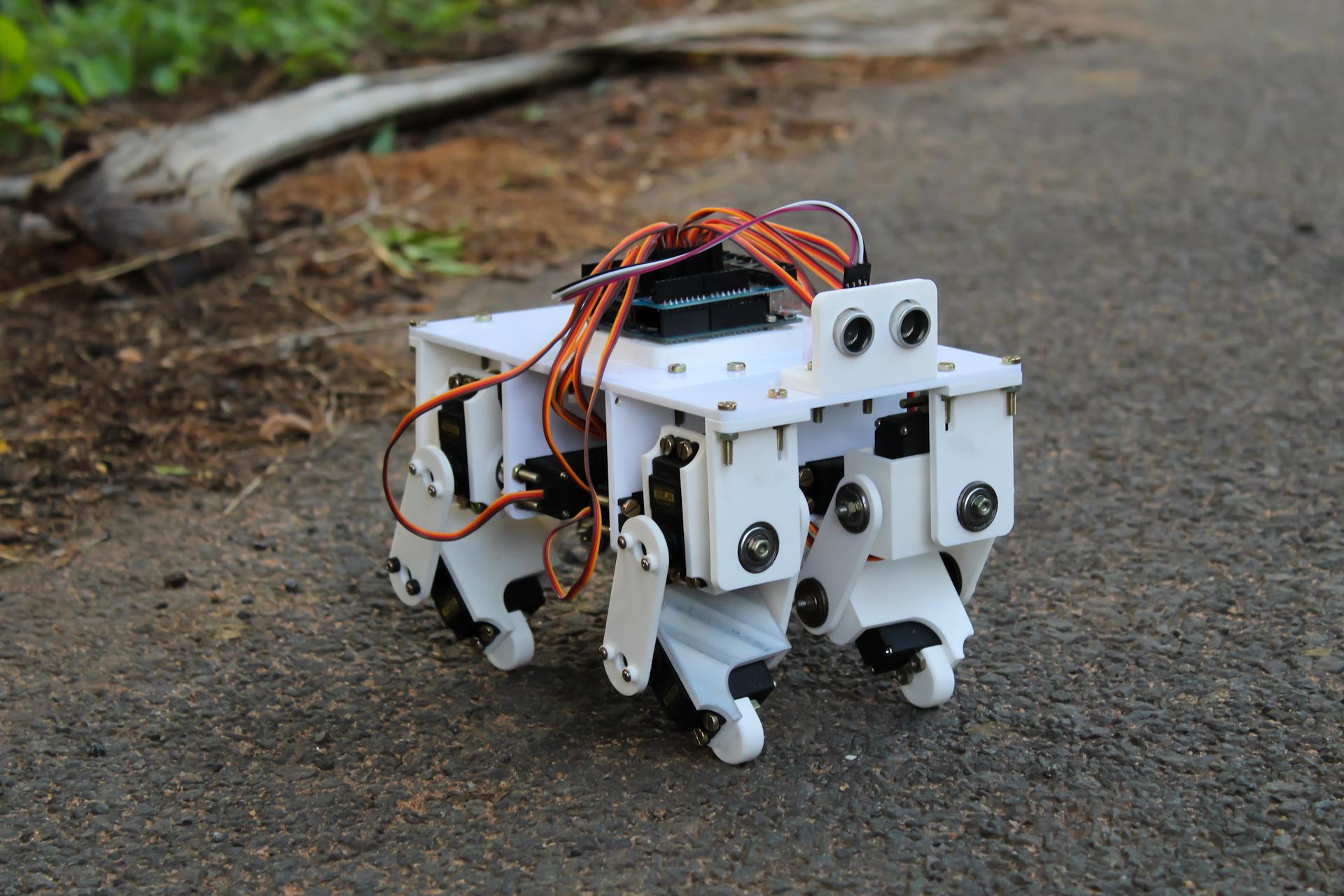
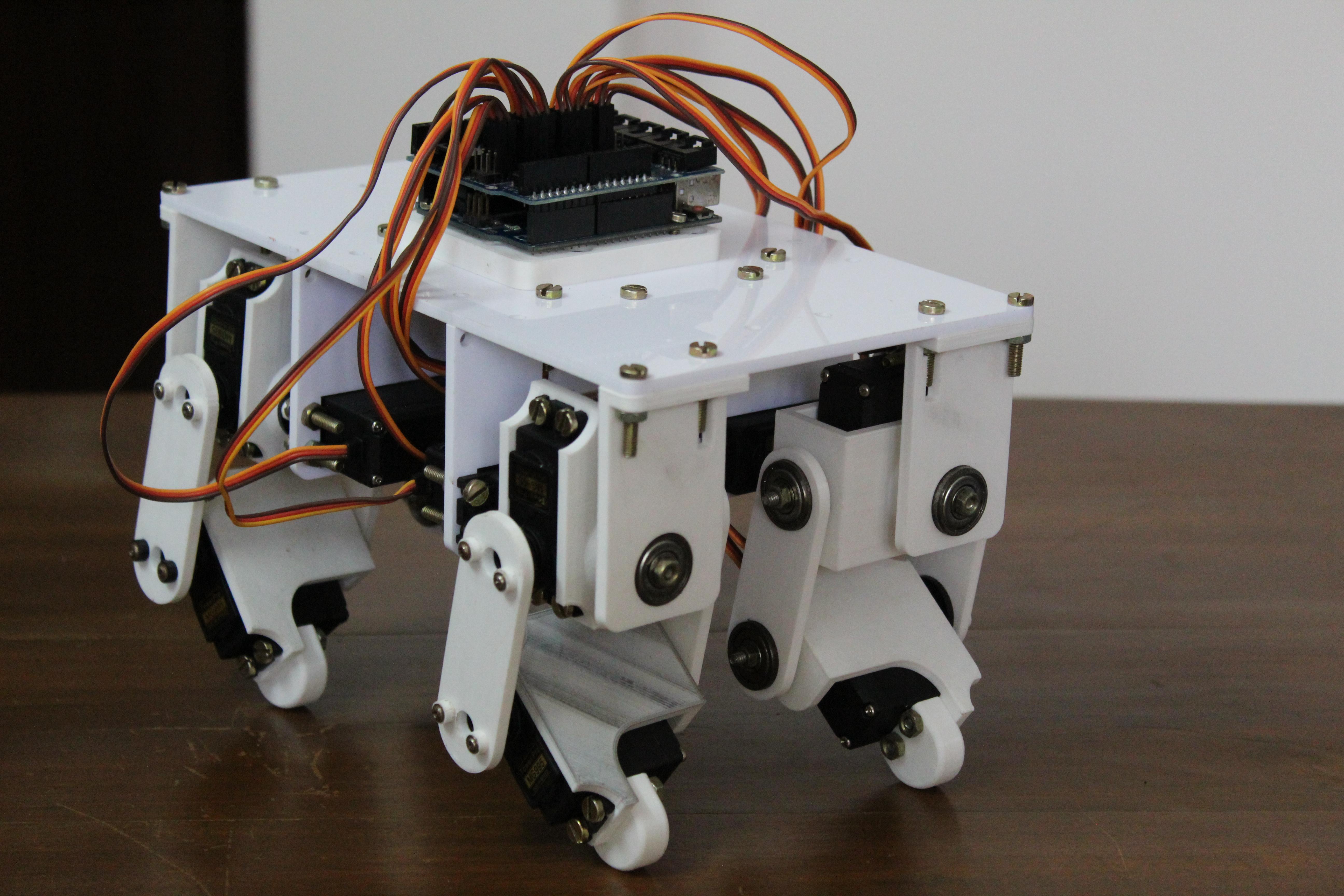
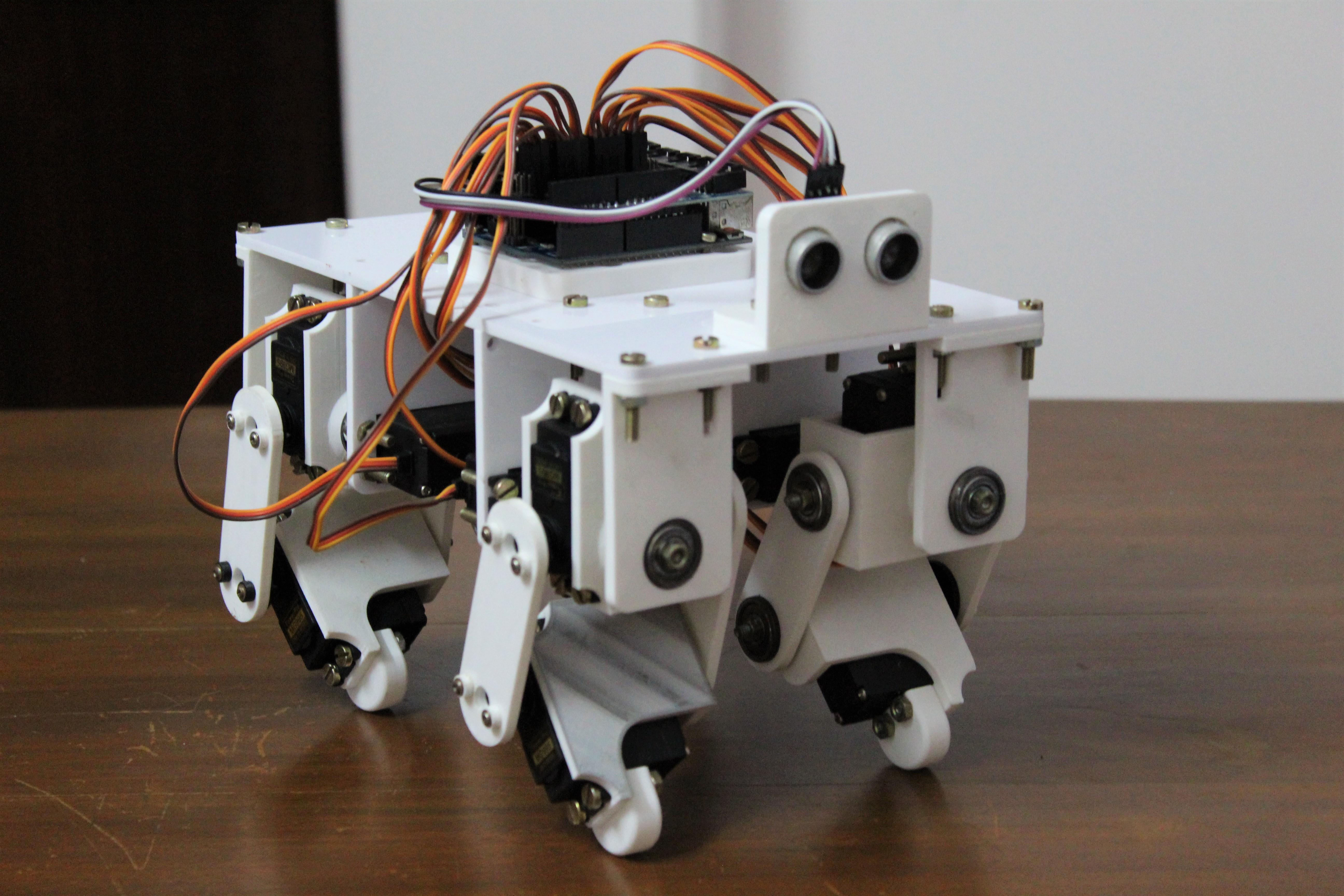
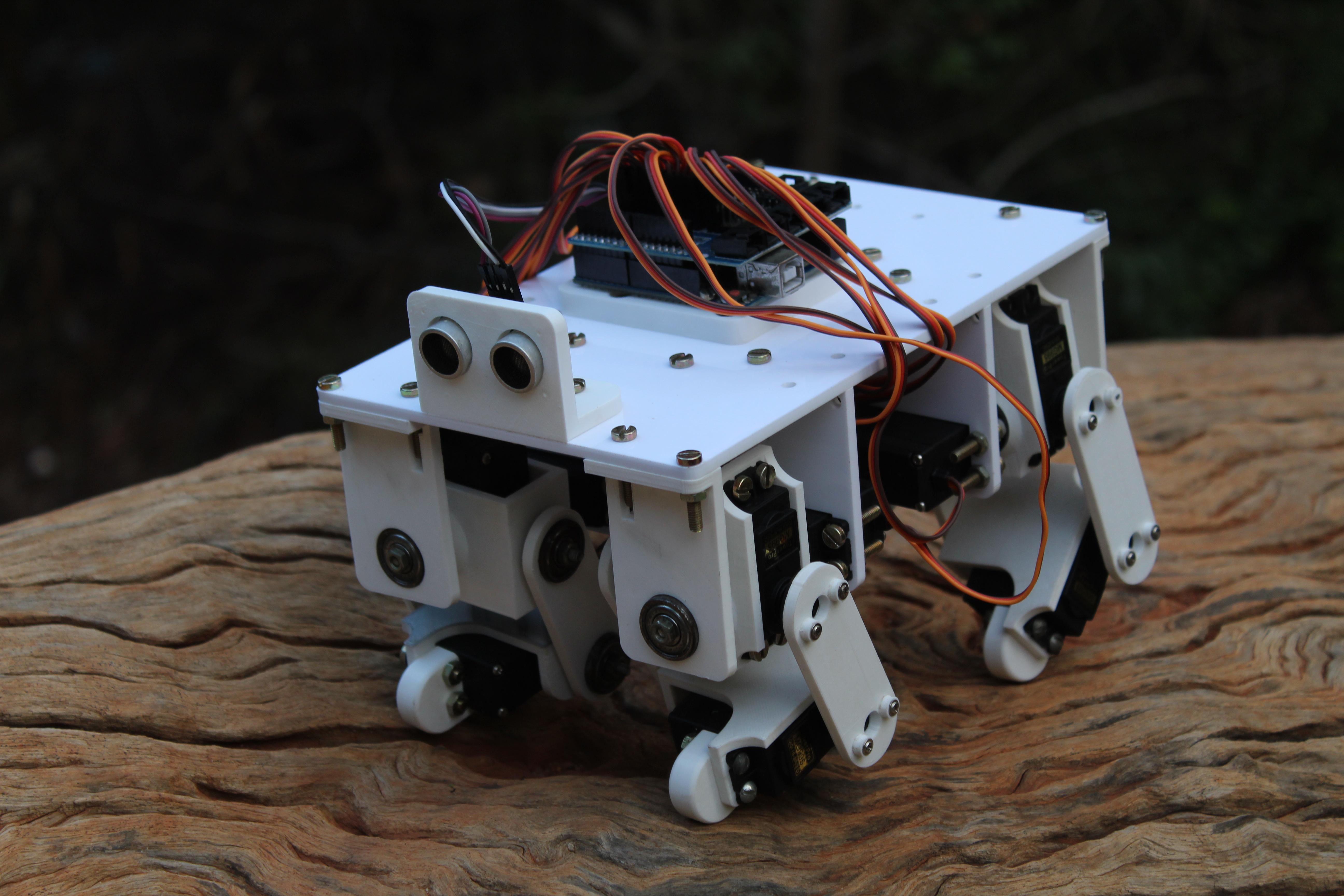
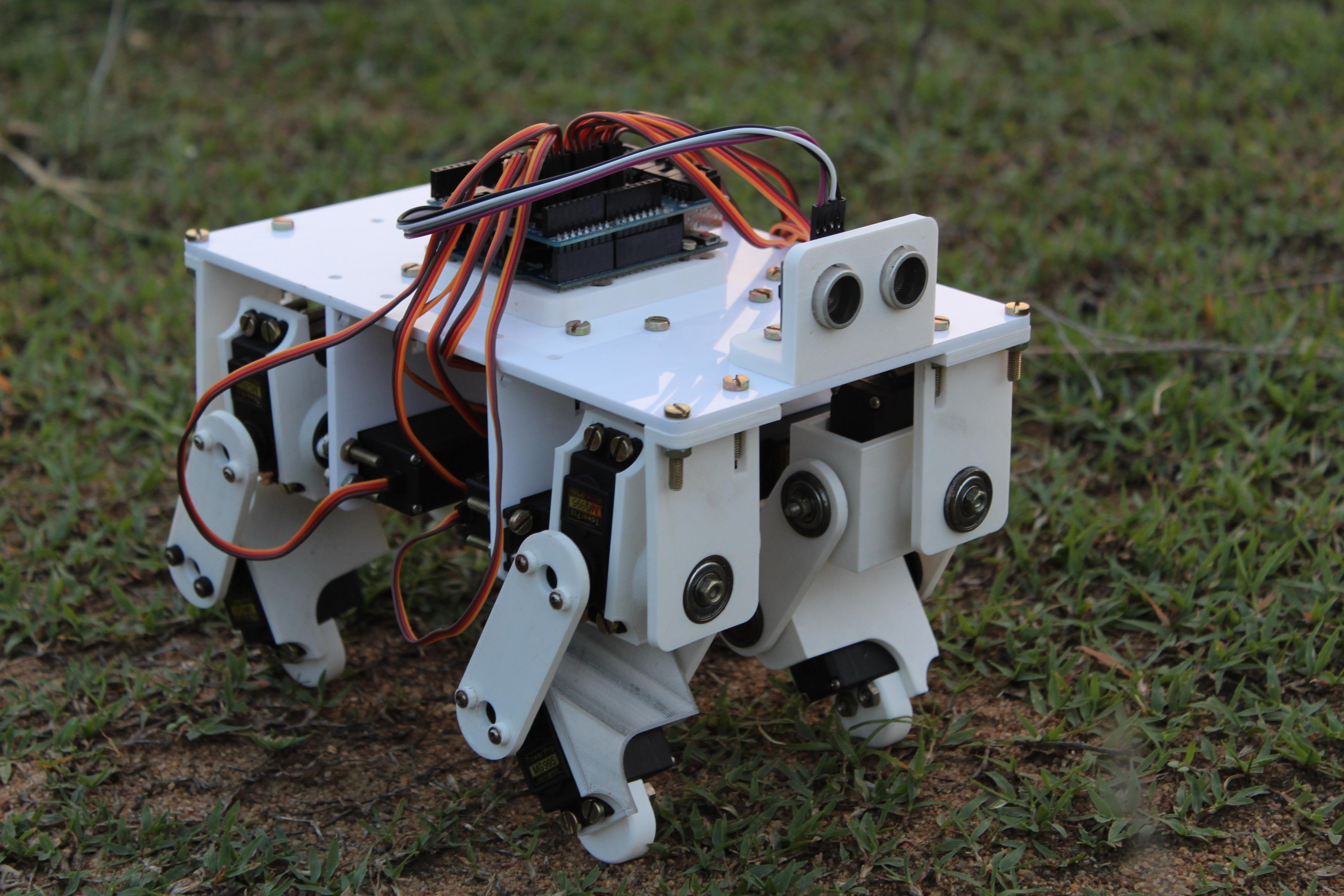
腿和躯干组装完成后,即可组装机器人。使用安装在股伺服电机支架上的角支架将腿固定到四个伺服电机上。最后,使用轴承座将对置的轴支撑在大腿托架上。将轴穿过轴承,并用螺母固定。用螺钉和螺母将轴承座固定到顶板上。
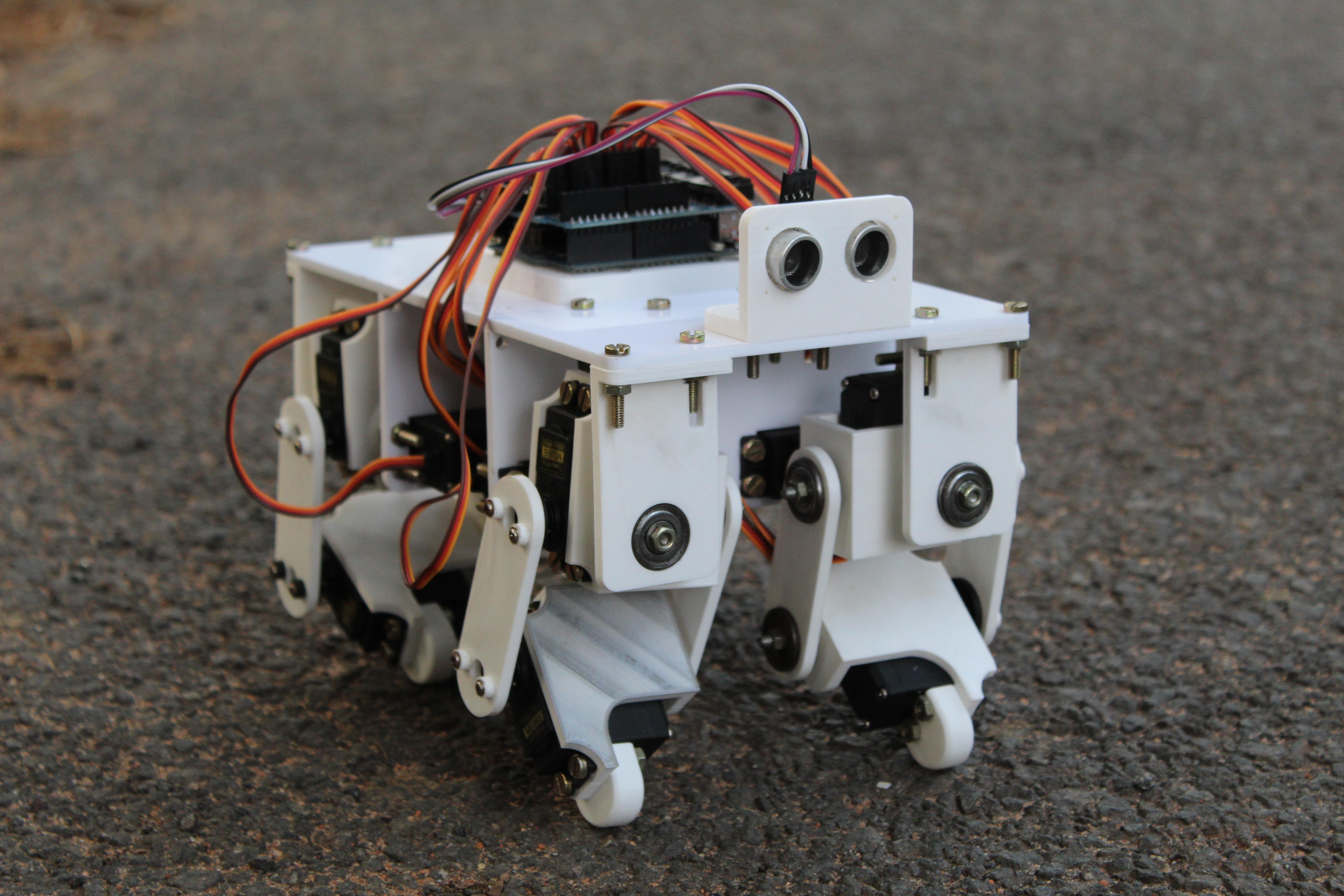
四足机器人准备就绪。
步骤9:电线和电子产品

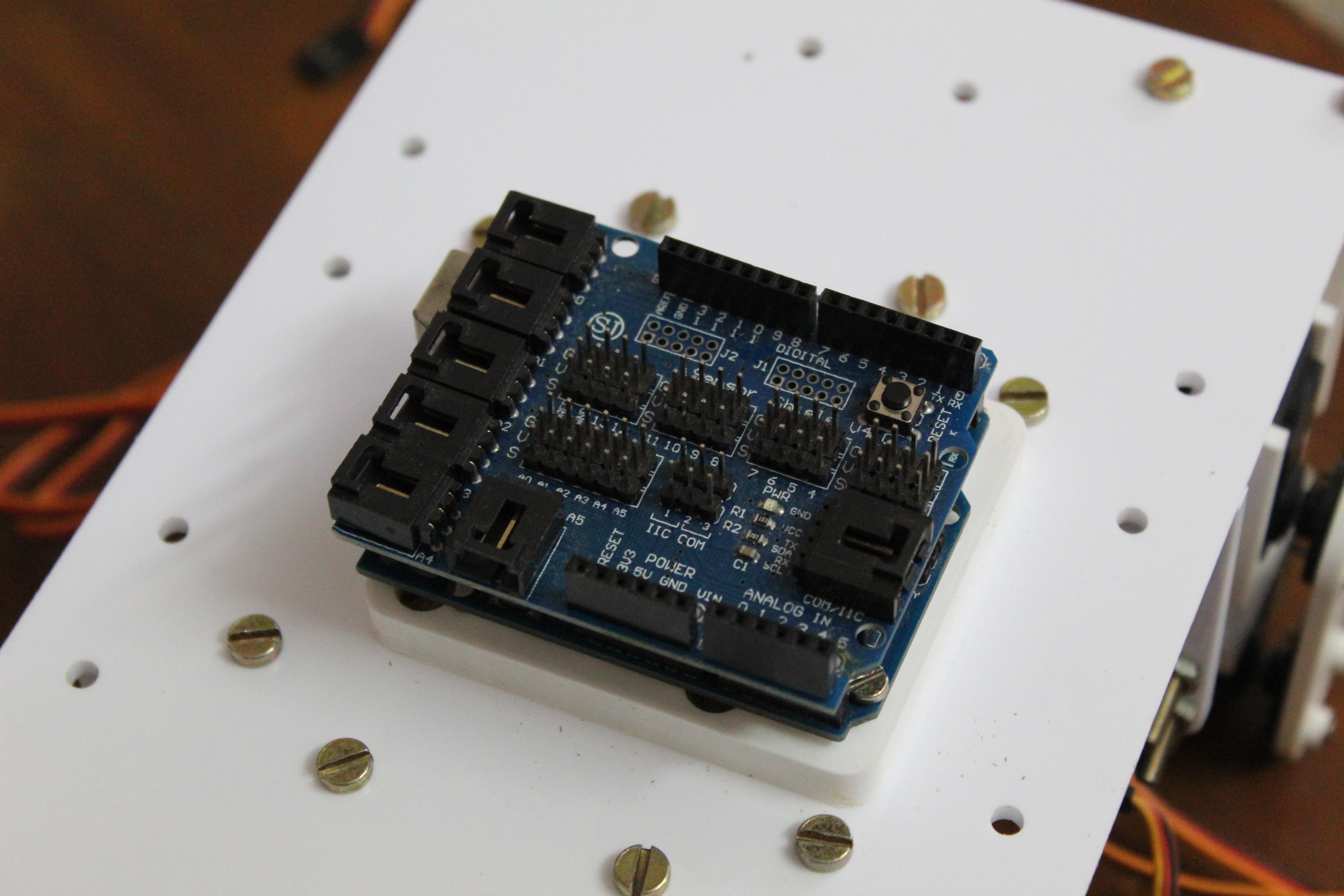

我决定使用一块扩展板来连接传感器护罩,那里有伺服电机的触点。我会推荐它的第5个版本-有一个单独的连接器用于连接外部电源。但是我的董事会没有此选项。我研究了它,并意识到它可以从Arduino电路板上获取5V电源(当涉及到诸如伺服电机这样的强大用户时,这是一个很糟糕的主意,可能会损坏Arduino)。我通过弯曲5V引脚使其不连接到Arduino电源轨解决了这个问题。这样,您可以在不损坏Arduino的情况下为5V引脚提供外部电源。
以下是伺服电机和电路板触点的连接。注意:Hip1Servo是连接到躯干的髋部伺服电机。Hip2Servo-连接到腿部的髋部伺服电机。KneeServo-膝关节伺服电机。
腿1(左前):
Hip1Servo-2
Hip2Servo-3
KneeServo-4
腿2(右前):
Hip1Servo-5
Hip2Servo-6
KneeServo-7
腿3(左后):
Hip1Servo-8
Hip2Servo-9
KneeServo-10
脚4 (右后):
Hip1Servo-11
Hip2Servo-12
KneeServo-13
步骤10:初始设定
在开始编写复杂运动之前,必须为每个伺服电机设置初始位置。他们将为机器人提供参考点,从参考点开始进行不同的运动。
为避免意外损坏电机,您可以先从电机上卸下角支架。然后将代码上传到Arduino(下面的链接)。该代码将所有伺服电机转到90°位置。然后将支架旋回,以使所有支脚完全平齐,并且附在躯干上的伺服电机垂直于顶板。
某些关节可能未完全对齐。然后您将需要更正代码第四行上的zeroPositions数组的值。每个数字代表相应伺服电机的零位置(它们的顺序与Arduino连接列表中列出的顺序相同)。试一试价值观,直到双腿完全笔直。
例如,我得到以下值:
int zeroPositions[12] = {93, 102, 85, 83, 90, 85, 92, 82, 85, 90, 85, 90};content.instructables.com/ORIG/F9K/WO73/KFZEKX13/F9KWO73KFZEKX13.ino
第11步:关于运动学的一些知识
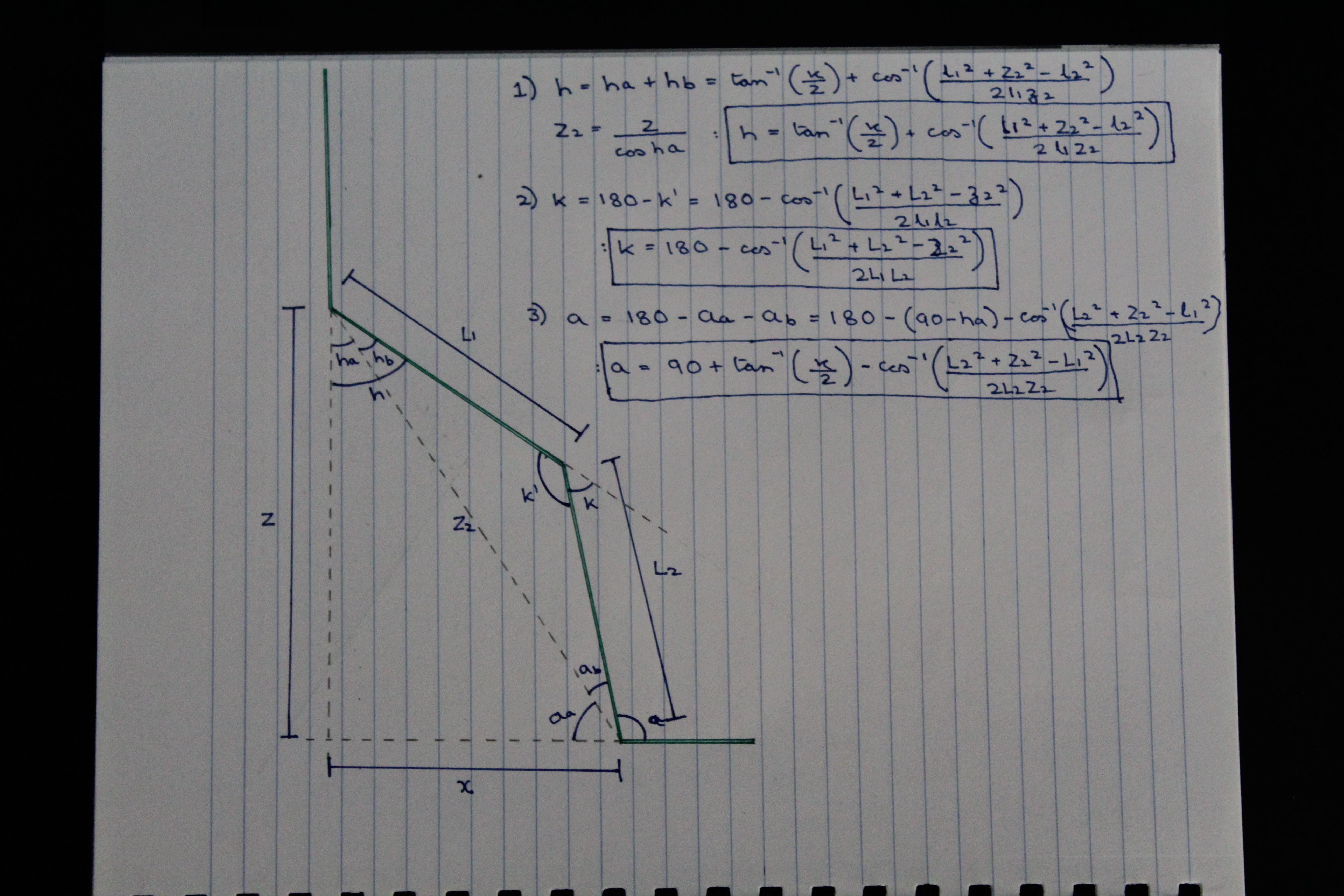
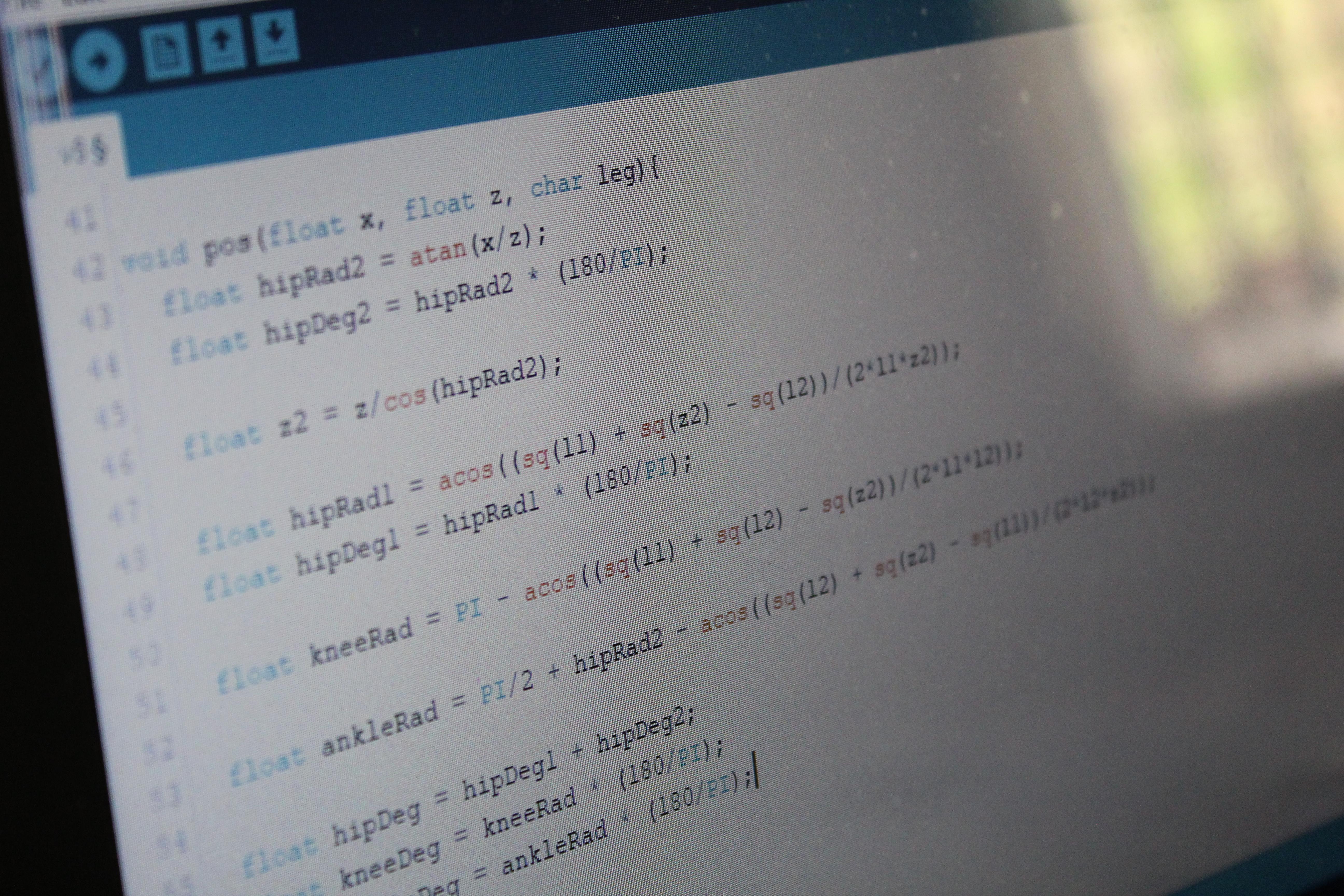
为了迫使机器人执行有用的动作-步行,跑步和其他动作-必须为伺服电机编程运动轨迹。这些是效应器沿其移动的轨迹(在我们的情况下为腿)。这可以通过两种方式实现:
12:

一旦完成连接和初始化,就可以开始对机器人进行编程,并为其提供炫酷的轨迹来执行有趣的任务。在第四行的代码中,将值更改为您在初始化步骤中输出的值。上传代码后,机器人应开始行走。如果您注意到某些关节的方向相反,请在第5行的数组中更改相应的值(-1到1,反之亦然)。
content.instructables.com/ORIG/FA6/3ZNJ/KFZEKX4Y/FA63ZNJKFZEKX4Y.ino
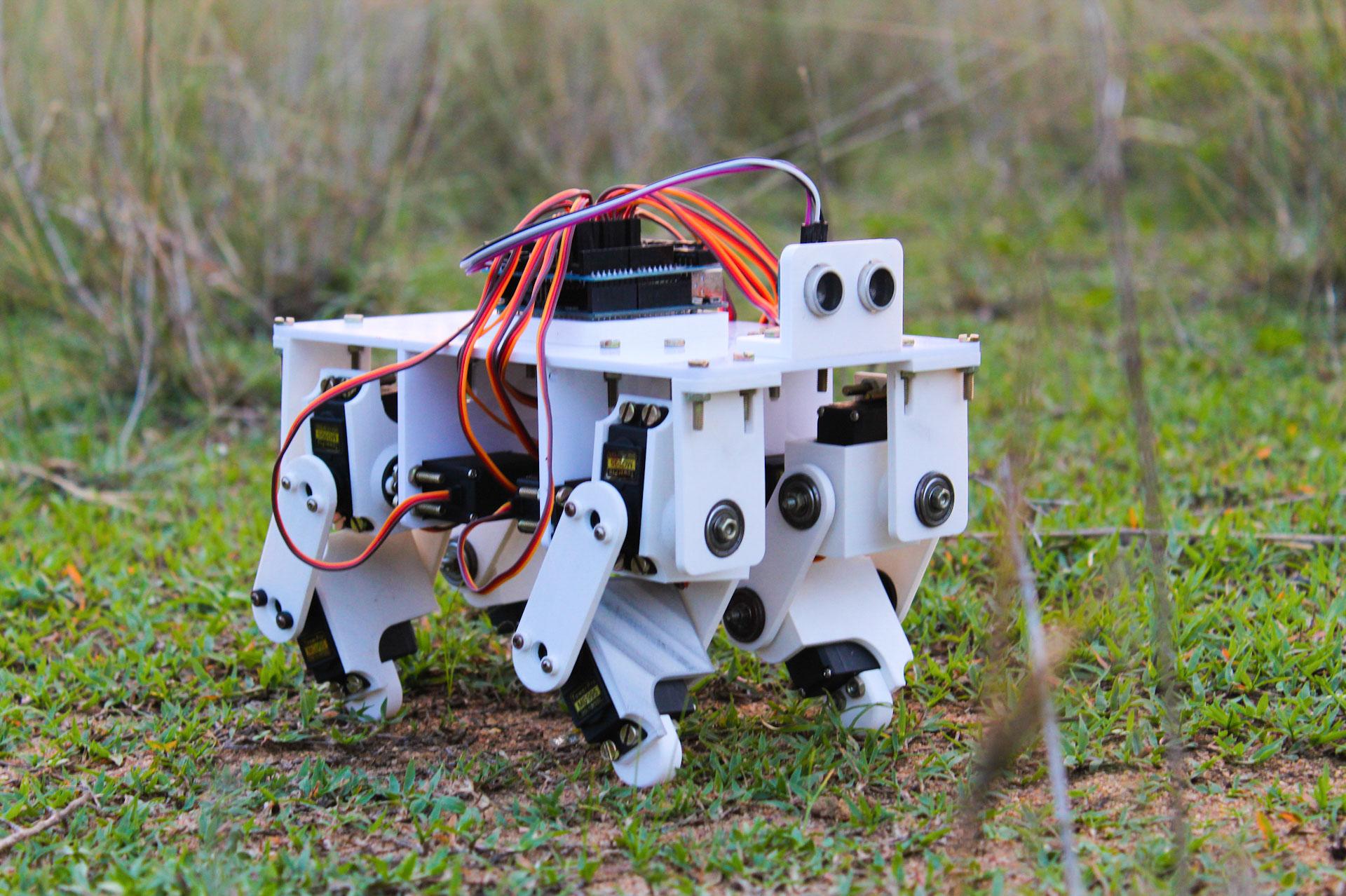
步骤13:实验摘要和时间安排

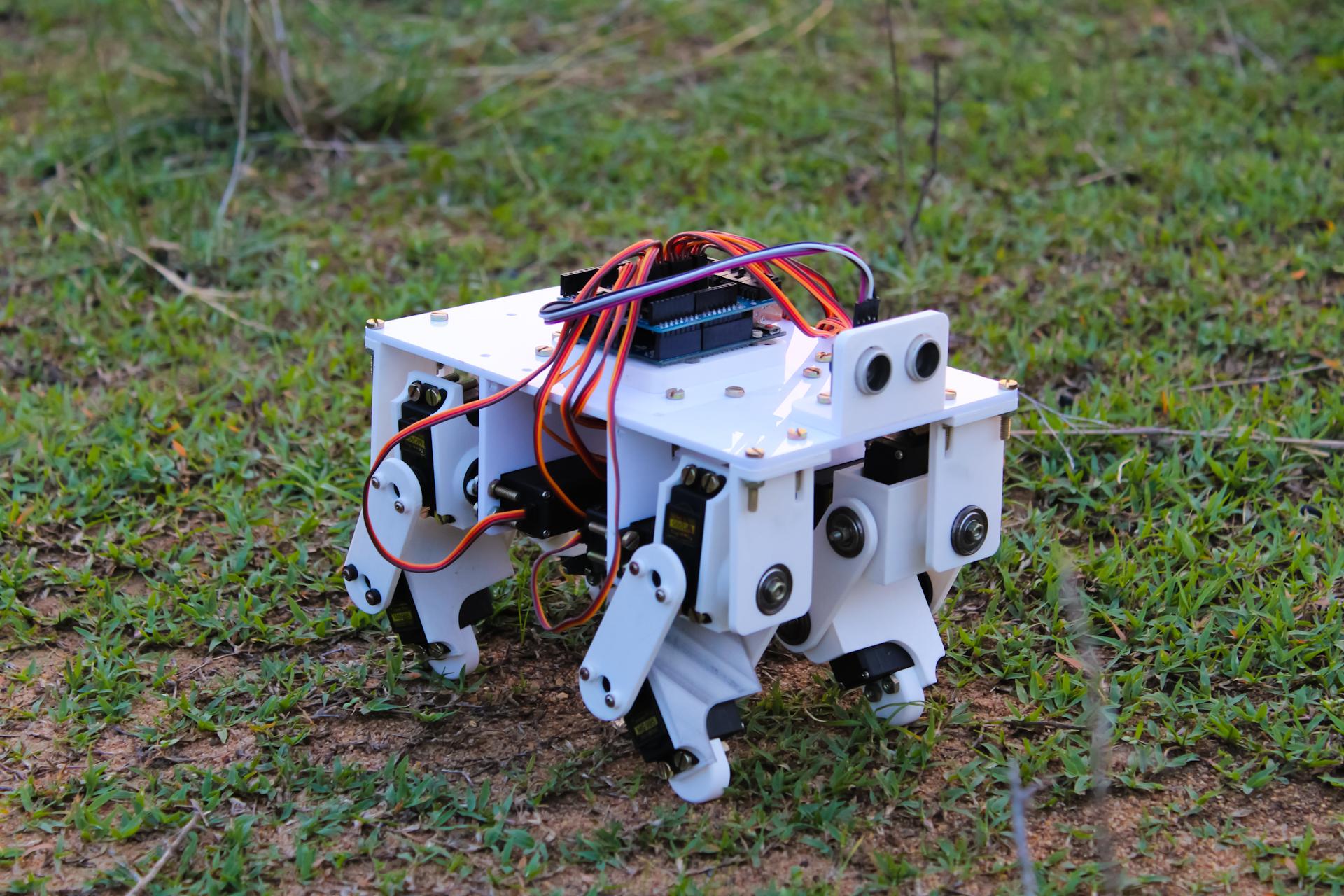
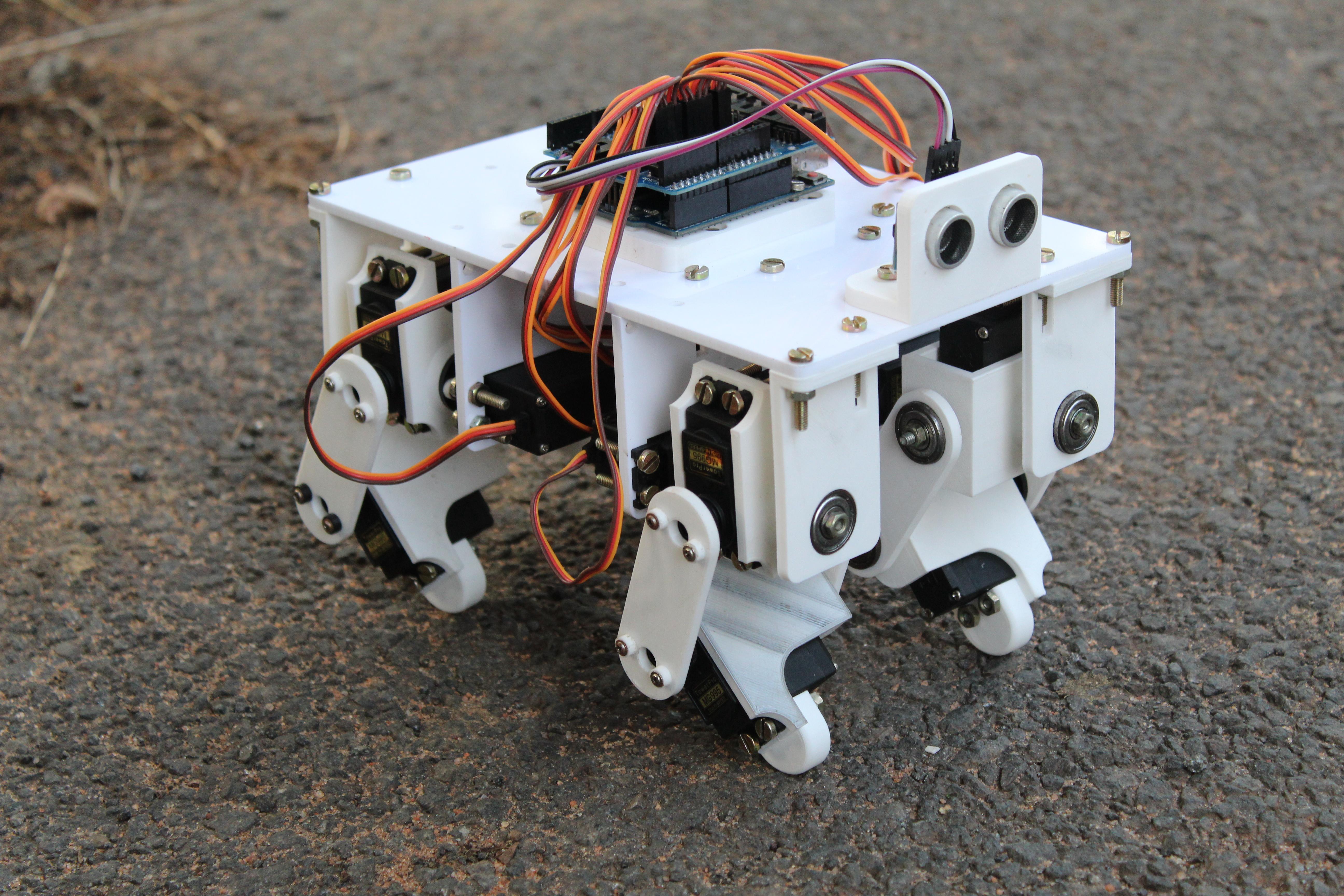
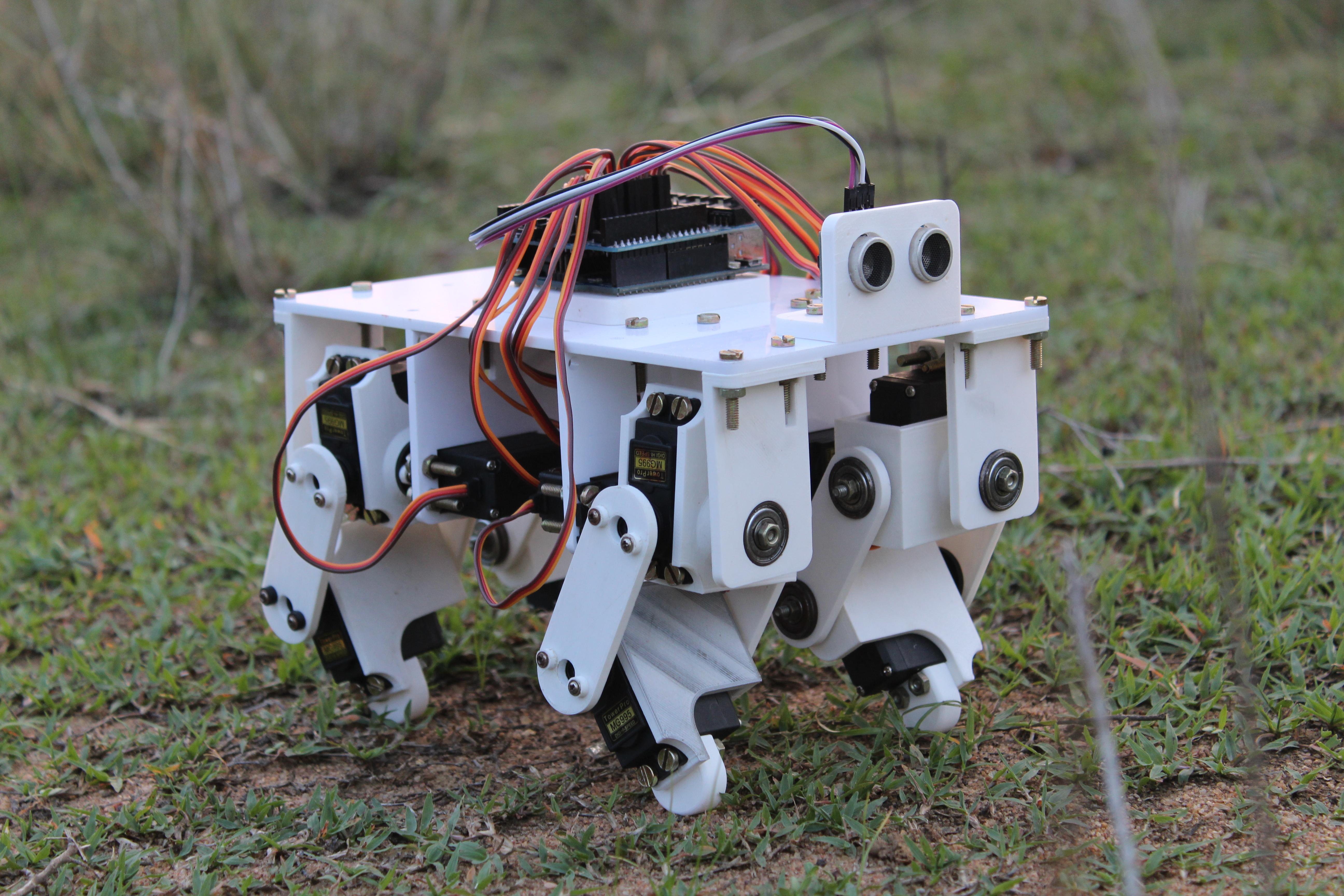
机器人可以执行2到5厘米长的步骤。步行速度也有所不同。该机器人提供了一个可靠的平台,可用于试验步态和其他诸如跳跃或执行复杂任务之类的事情。我建议更改运动轨迹,体验不同的步态,观察它们如何影响机器人的工作。我在上身提供了各种安装座,以便可以将诸如测距仪或惯性传感器之类的传感器安装在那里。您可以尝试在那里固定一些抓地力。