最近,FaceBook上有一篇有趣的文章,内容涉及如何使用单眼相机拍摄出色的3D。该文章在实践中不太适用。但是图像质量令人着迷:

考虑了这一点之后,我决定简短介绍一下文章的内容,现代技术的来龙去脉以及在实践中可以期望得到什么。
让我们从基础开始。拍摄3D的方法有几种:
主动式3D相机(激光,投影,TOF)。我们辐射,我们测量。
立体声相机。我们根据几何估计深度。
单眼。我们使用经验或摄影机偏移来估计深度。
在本文中,我们将分解单眼。有什么困难?是的,在这里:
这张图片很好地描述了主要问题。即使是一个人也无法从一个角度估计深度,虽然有些可以,但是精度将不是很好,并且可能会出现很多错误。
他们如何处理呢?相机应移动且场景不应改变。可以组合该图像的算法称为“ SLAM”。逻辑大致相同(我对此进行了大致描述):
在第一帧中,选择一组功能部件并将它们放在一个普通袋中。
在每个新框架上,选择功能部件,并将其与包装袋中的功能部件进行比较。
- , -
2014 ( ):
. . .
.
:
OpenSource COLMAP. , .
?
SLAM 3D:


?
. , - . , - .
. “ ”? . “ ”, , , . .
- . - . KITTY:
- .
3 “ ”, - , “ ”, “ ”. , .
- - Depth Estimation, “” - .
. , “ ”, .
MiDaS
MiDaS. , :
. , , , ...
+ .
MiDaS :
. ? - :

, . :
( )
,
, , :

. SLAM . , .
. DELTAS

TSDF , . . :
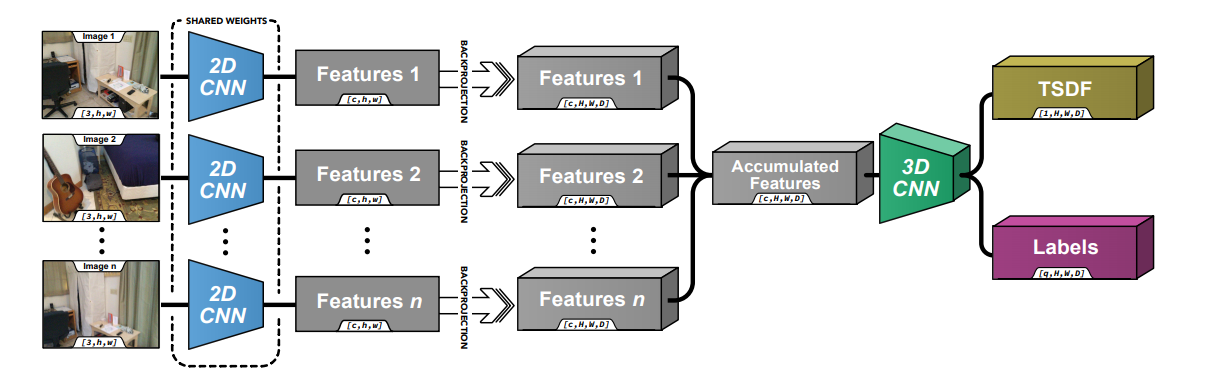
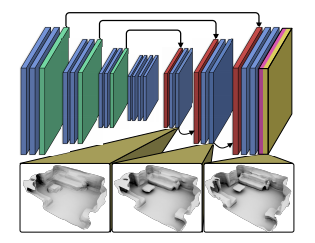
, :
, , TSDF.
? 3D . iPhone’ :
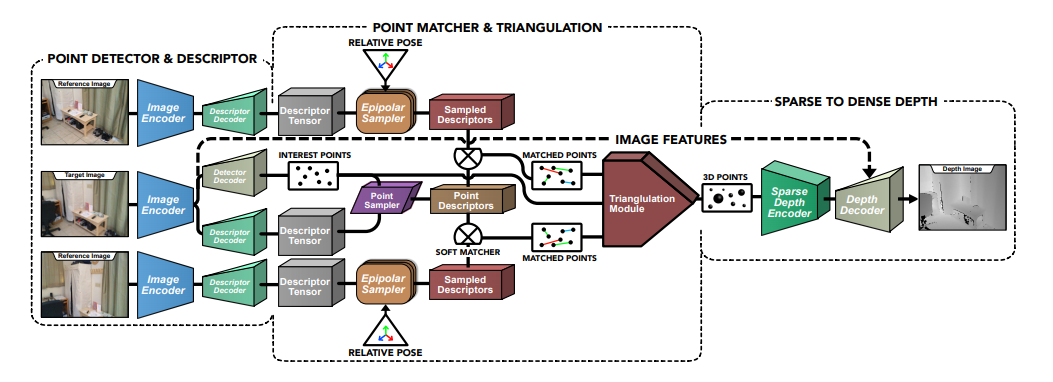
Consistent Video Depth Estimation
, ? , . . “Consistent Video Depth Estimation”.
, , SLAM . :
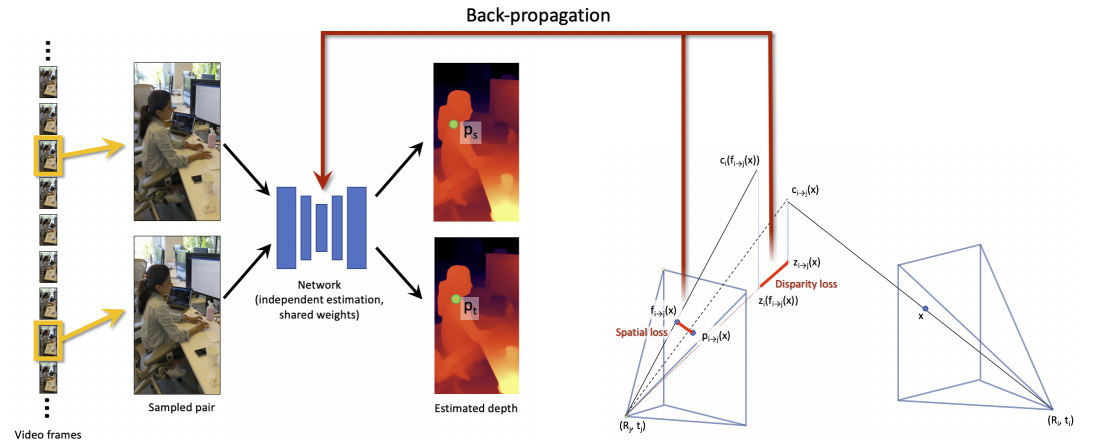
-, () . - - . 4-5 10- . :
? . , colab .
. , :
, , depth . , , depth - - , , . . - .
Monocular Depth . , , , , .