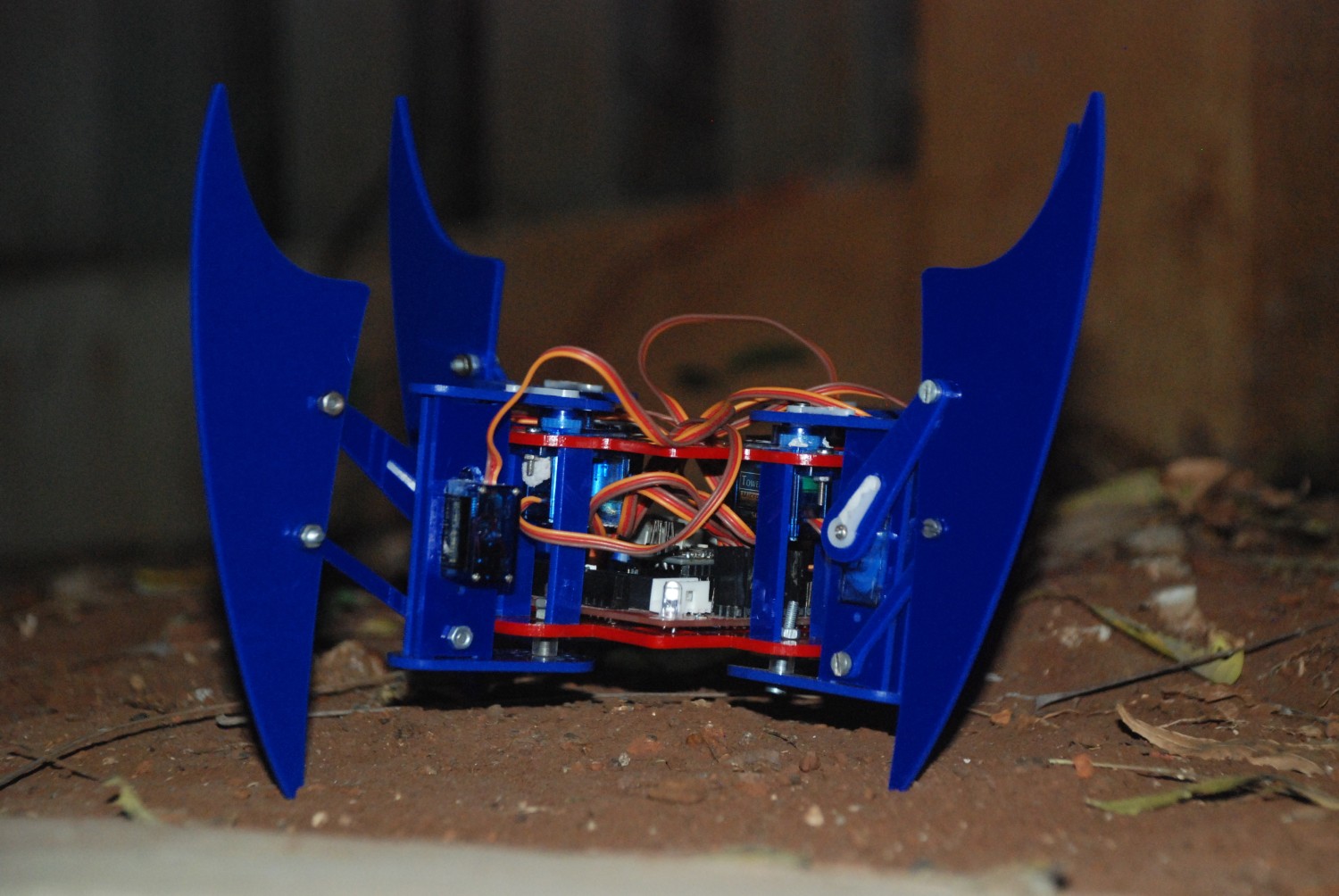
Miles是基于Arduino Nano的蜘蛛机器人,使用4条腿进行行走和操纵。8个SG90 / MG90伺服电机用作支腿驱动器。特制的电路板使您可以控制电动机和Arduino Nano并为其供电。该开发板具有用于IMU模块,蓝牙和红外传感器的特殊插槽,使机器人具有自主权。机身是由2毫米厚的有机玻璃在激光切割机上切割而成的,但也可以在3D打印机上进行打印。对于发烧友学习机器人逆运动学的优秀项目。
受mePed项目(www.meped.io)的启发,并使用基于该代码。


用料
组件:
- 费用(1)
- 用于车身组装的Miles组件。
- SG90 / MG90伺服马达(12)
- Aduino Nano(1)
- LM7805稳压器(6)
- 开关(1)
- 0.33uF电解电容器(2)
- 0.1uF电解电容器(1)
- 3.08mm 2针Phoenix连接器(1)
- 伺服电机的公连接器。
可选的:
- 2针连接器Relimate(1)
- 10针连接器Relimate(1)
- 4英寸连接器Relimate(1)
步骤1:原理图和

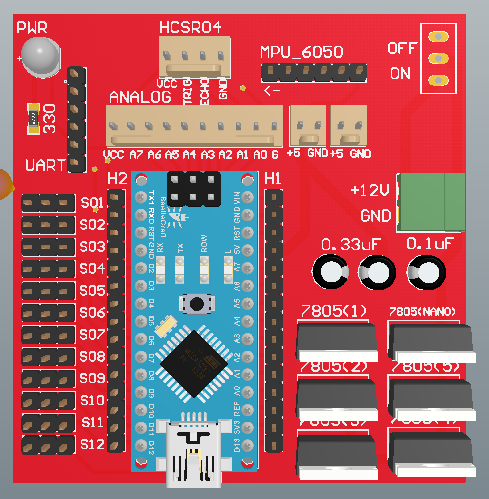

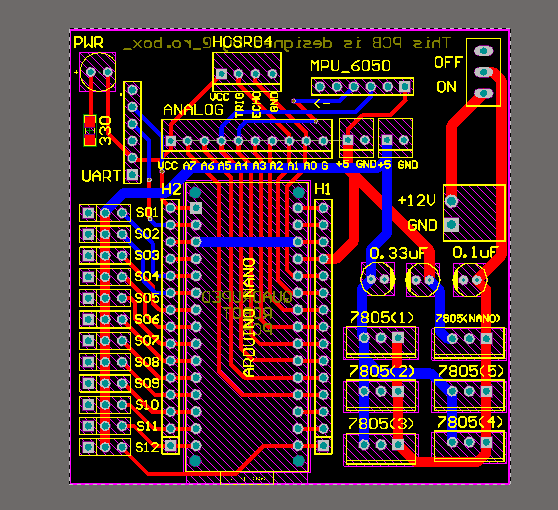
电路板设计我在Altium中设计电路板。同时运行时,12台SG90 / MG90伺服电机可吸收4-5A电流,因此电路必须能够承受大电流。我使用7805稳压器为电动机供电,但是它们每个都可以提供最大1 A的电流。因此,我并联连接了6个LM7805,从而增加了可用的输出电流。从链接
下载方案和Gerber文件。 该计划的特点:
- MPU6050 / 9250用于测量角度。
- 输出电流高达6A。
- 伺服电机的隔离电源。
- 超声波传感器HCsr04的输出。
- 有蓝牙和I2C的外围设备/
- Relimate具有用于传感器和执行器的所有模拟触点。
- 来自12个伺服电机的输出。
- 指示灯LED。
董事会的特点:
- 77×94毫米。
- 2层FR4。
- 1.6毫米
步骤2:焊接组件并加载代码

随着组件的生长而焊接,并从表面贴装设备开始。
在我的电路中,只有一个TMP电阻。向Arduino和LM7805添加母针,以便可以根据需要进行更改。将公引脚焊接到电动机连接器上。
该电路使用5V电源,分别用于电动机和Arduino。检查所有电源轨上的接地短路-Arduino 5V输出,VCC电机输出和12V Phoenix输入。
检查电路板后,您可以对Arduino进行编程。我在Github上发布了测试代码。装满并组装机器人。
步骤3:组装机壳

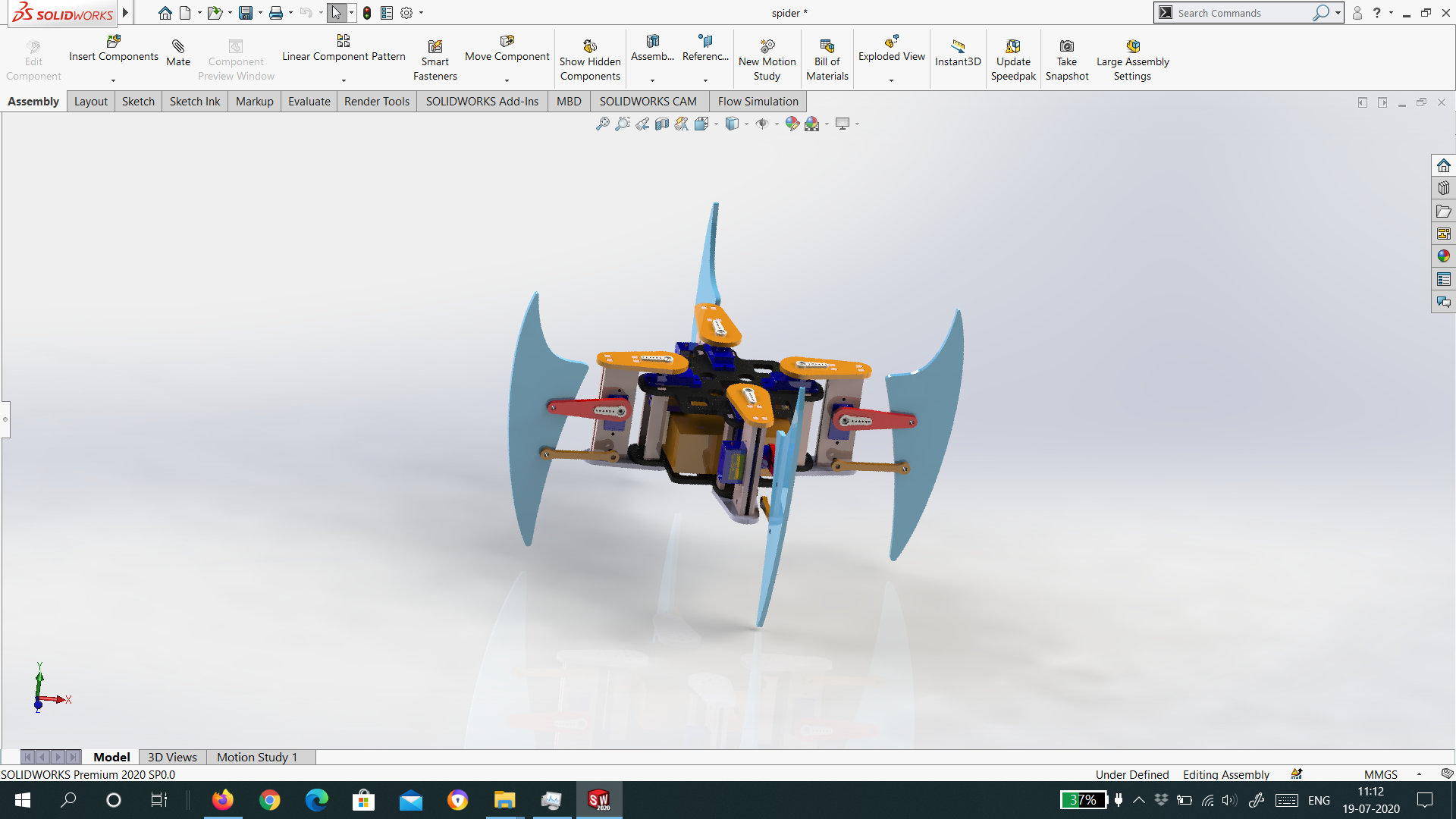
该机器人总共包括26个零件,可以在3D打印机上打印或从2毫米的有机玻璃上切割下来。我使用2毫米红色和蓝色有机玻璃板使机器人看起来像蜘蛛侠。
主体中有几个连接可以用螺栓和螺母M2和M3固定。伺服电机通过M2螺栓固定。拧上盖子之前,请先安装电池和电路板。
我将必要的文件上传到Github。
步骤4:连接并测试
按以下顺序连接:
- 左前旋转电机。
- 左前提升马达。
- 后左回转马达。
- 左后提升马达。
- 右后旋转马达。
- 后右提升马达。
- 右前回转马达。
- 右前提升马达。
滑动开关启动机器人。
步骤5:未来的改进
逆运动学
当前代码使用位置方法-我们设置电动机必须旋转以执行特定运动的角度。逆运动学将使机器人行走更加复杂。
蓝牙控制
板上的UART连接器允许您连接蓝牙模块(例如HC-05),以从智能手机无线控制机器人。