可以毫不夸张地说,人体可以跻身于地球上最复杂的生物系统之列。我们的身体由数十亿个细胞,许多器官和系统组成。但是,由于只有两个细胞-精子和卵子的融合,才产生了所有这些辉煌和多样性。我认为无需解释施肥的方式以及对此的要求(提示-鹳和白菜与它无关)。但是这里有些年来精子生命的某些方面仍不清楚。布里斯托大学的科学家使用现代的三维显微镜技术,以前所未有的方式看到了精子的运动。我们从科学家的报告中学到了精子如何运动以及以什么方式运动。走。
研究依据
尽管事实上精子早在科学方法问世之前就参与了生命的创造,但它们在科学文献中的发展道路却是在最近-1677年。医学生约翰·加姆(Johann Gam)与同事和朋友安东尼·范·列文虎克(Anthony van Leeuwenhoek,1632-1723年)分享了他的观察结果,后者又对“动物性动物”(他称为精子)进行了详细描述。
Anthony van Leeuwenhoek / Lazzaro Spallanzani / Carl Ernst von Baer
Leeuwenhoek建议这些异常细胞参与受精,但他的理论虽然是正确的,但遭到科学界的拒绝。长期以来,人们认为精子是寄生虫,只有精液参与受精。
仅仅一百年后的1786年,Lazzaro Spallanzani(1729-1799)在他的著作“ Experiencias Para Servir a La Historia de LaGeneraciónDe Animales y Plantas”中证明了精子参与受精的事实。然而,他对这一过程本身的解释却相当模糊:他认为卵子已经是一种新生物的开始,而精子只需要激活生长过程即可。
卡尔·恩斯特·冯·巴尔(Karl Ernst von Baer,1792年-1876年)在19世纪初引入了相同的术语“精子”。
不管几个世纪前科学家认为什么,精子具有非常清晰的功能,其实现由许多专用工具提供。人类精子的主要任务是穿过女性生殖道,找到卵子并将男性遗传物质转移给她。

精子的结构
雄性生殖细胞不能夸口,因为它是人体中最小的(不包括尾巴):头部的尺寸为5.0x3.5x2.5微米(长x宽x高),中间部分的长度为4.5微米,并且尾巴长度-45微米。
同时,小尺寸不是缺点,而是提高速度的深思熟虑的方面。在精子成熟的过程中,精子的细胞核(带有一组染色体)变得更致密,大部分细胞质被丢弃,只有最重要的细胞器保留在细胞中。
鞭毛可被称为精子的第二重要元素,仅次于细胞核。他的尾巴。正是由于他,这个细胞才沿着女人的生殖道运动。有趣的是,阴道环境对雄性生殖细胞具有极强的破坏力,但精液可部分减少对精子细胞的负面影响。女性生殖道内的pH值使精子向子宫运动,在那里等待着更有利的环境。
以前,人们认为,由于鞭毛从一侧到另一侧的对称运动,精子会向前移动。
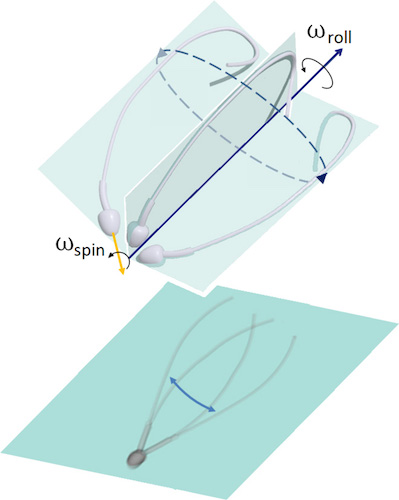
图片#1:鞭毛在3D模式下的不对称运动(上图);鞭毛运动的平面投影,在2D显微镜下(从下方)产生双侧对称的错觉。
即使在列文古克时代也表达了这一说法。它还导致在三个维度上对称地理想化波形,通常被视为圆锥形螺旋,类似于膨胀的开瓶器。
由于二维显微镜,许多观察结果被错误地解释,有时是完全错误的。关于鞭毛瓣对称性的陈述与许多观察结果相矛盾,这些观察表明鞭毛本身框架内的结构不对称。
如果在运动过程中精子鞭毛的拍打仍然不对称,那么鞭毛左右运动以及细胞向前运动的对称性如何?这个问题是本研究中的主要问题。
为了得到答案,科学家们比较了分子和显微镜观察结果,结果表明人类精子同时使用不对称和各向异性控制来调节鞭毛的拍打。换句话说,由于不对称而实现了对称:当头部同时旋转时(作者的话是“钻井液”),而不论精子鞭毛如何围绕运动轴旋转,都会出现“顶进”的效果。
研究成果
人类精子鞭毛的快速运动已经以3D高时空分辨率记录下来。检查了低粘度液体中的两组自由漂浮的精子:漂浮在盖玻片旁边的精子(在显微镜检查过程中放置在标本的顶部),并远离盖玻片。
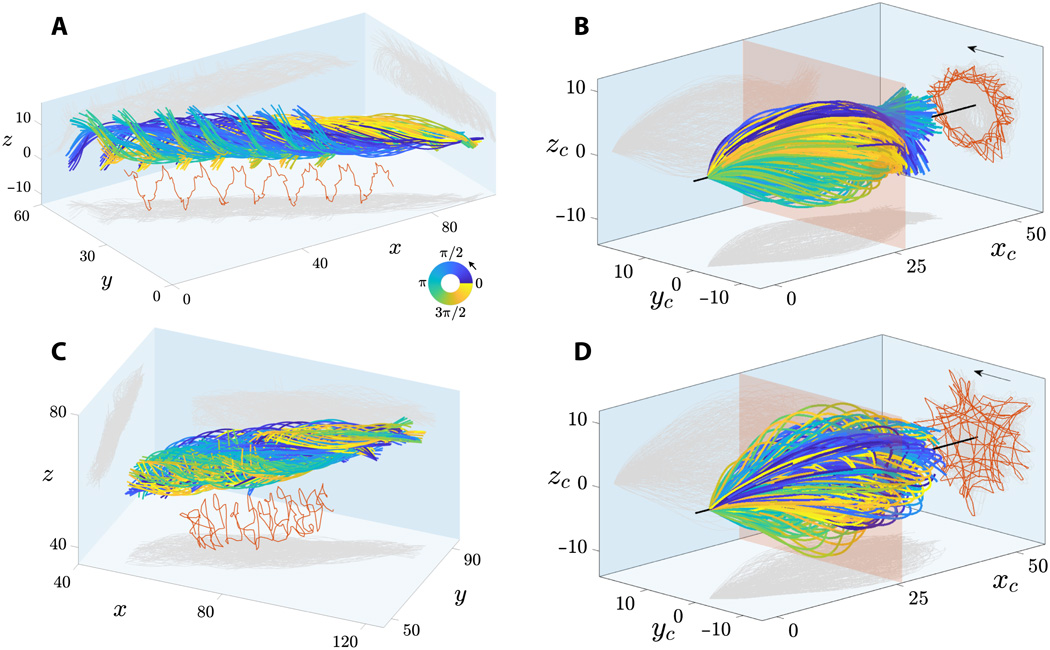
图像№2
在2A和2C上显示了在盖玻片附近和远处漂浮的精子鞭毛。鞭毛瓣的特征是围绕精子运动方向的特征性滚动运动。
精子鞭毛的组合旋转和平移运动导致鞭毛中点的螺旋轨迹,保留了手性(在2A处标记为红色)和2C)。精子绕其轴双向旋转:从前端观察时,所有自由漂浮的细胞(28个)逆时针旋转(2B和2D箭头),顺时针旋转仅2个细胞(由于障碍物而没有向前移动)在途中)。
显微镜下观察到盖玻片旁边漂浮的精子(相当于2A)。
所有精子(30个细胞)类似地移动到进动转动顶,其中周围的精子(ω的纵向轴线的头的旋转自旋)同时且不管发生怎样的鞭毛旋转相对于运动(ω的轴线卷)。
在2B和2D处示出了伴随*坐标系即观察点的鞭毛鞭状项随精子一起运动,但不绕其轴线旋转。这表明鞭毛笔划在平面(xy)和平面外(z)方向,对应于3D观测。
随附的参考系*是在特定特定时刻与所讨论的身体相关联的参考系。该系统内部的身体一动不动。例如,自由下落的电梯是自由下落的物体的伴随参照系,但是相对于电梯中的物体,地球不是这样的系统。鞭毛中间轨迹的投影(2B和2D中的红线)显示了令人难以置信的几何图案阵列,从旋转的恒星到具有极对称性的三角形,正方形和环状图案。对于在盖玻片上漂浮的精子,还观察到了二维显示的不规则鞭毛图案。模式的这种可变性可能是由于每个单元的拍打的平面内和平面外分量之间的相位滞后不匹配而导致的,这种不匹配会在滚动运动时间轴中增加。因此,鞭毛模式不是漂浮在盖玻片附近和远离盖玻片的细胞的区别特征。
鞭毛的显微镜检查和建模显示头部和鞭毛围绕运动轴的旋转。
3D波的振幅以对称的子弹形包络曲线为特征,这与通常在文献中描述的圆锥形螺旋(类似于膨胀的开瓶器)相反。从盖玻片上浮下来的精子比在玻璃杯旁漂浮的细胞更对称。因此,相邻的盖玻片是鞭毛拍打不对称的弱源。
漂浮在盖玻片旁的精子具有保留的迎角* -7°,精子鞭毛的平均方向指向盖玻片。
* — ( ) , .

图像#3
上面的图像显示了伴侣框架(上排)和附带的滚动框架(下排)鞭毛行程的比较。
图3E显示了从精子角度看鞭毛节拍的真实本质,没有任何浮动或滚动运动。
随附的滚动参考系(3E)显示鞭毛襟翼是各向异性的,即在标记为“ b平面”(蓝色平面)和“ z平面”(红色平面)的每个横向方向(垂直于拍打平面)上的波动特性明显不同。
如果我们比较3E时蓝色和红色平面上的浅灰色区域,然后可以看出,拍打在b平面中是非常不对称的,其特征是左右对称对称断裂,让人联想到C形。
此观察结果与在共同移动的参考框架中3A处观察到的对称图案形成鲜明对比。
相对于实验室固定参考系(x,y,z)的鞭毛波形。
三维波形的主成分分析(PCA)已使科学家能够将鞭毛波分解成几种“基本形状模式”,在此称为PCA模式。如3B和3F所示,仅使用两种波形模式就可以高精度地重建3D波形。
在3C中,可以看到前两个PCA模式的形状相同,最大旋转90°,从而捕获了精子滚动引起的流线型螺旋形状。但是,
在3G上,只有第一个PCA模式才能完全检测到内部不对称C形。3G上的第二种PCA模式(以橙色突出显示)会引入与第一个PCA模式垂直的小偏差(以蓝色突出显示),表明该波形可以分解为本质上各向异性的两个独立的横向波动方向。
扫描的傅里叶分析使得仅使用3D和3H上的两个傅里叶模式就能重建鞭毛的运动。简而言之,每个公共摆幅信号可以通过两个函数的简单求和来近似:
f r(s,t)≈f 0(s)+ | f 1(s)| sin(ωt+φ(s))第一函数f 0(s)不依赖于时间,它被称为“静态模式”,并且沿鞭毛弧(s)的长度固定平均信号不对称性。
第二个功能是正弦波,称为“动态模式”,以信号功率谱的第一个峰值捕获的频率振荡。
沿着鞭毛的行波的振幅和相位调制分别等于| f 1(s)|并且φ(s)= arg(f 1(s))。
因此,相位携带有关行波特性的信息。例如,如果相位φ(s)不沿s变化,则信号不是行波,而是驻波。
因此,静态模式捕获任何波形失配。在这种情况下,3D中的黑色直线反映了共同运动框架中xy和xz平面中摆动的对称性。相反,在伴随滚动参考框架(3H)中,静态模式(黑色曲线)的特征是不对称振幅大,让人联想到倒C。
鞭毛相对于参考框架的波形。
鞭毛相对于随附的滚动参考系的波形。由于精子的滚动,3D
伴随帧中的动态模式(红色曲线)具有较大的振幅,并且在xy和xz平面中高度对称。 但是,伴随的3H滚动参考帧(红色曲线)中的动态模式具有减小的波形幅度和优选的行进方向。 波形的傅立叶重构是通过将静态和动态模式相加(3D和3H中央的图形)进行的,这与原始观测值(3D右侧的图形)非常吻合
和3H)。
图像#4
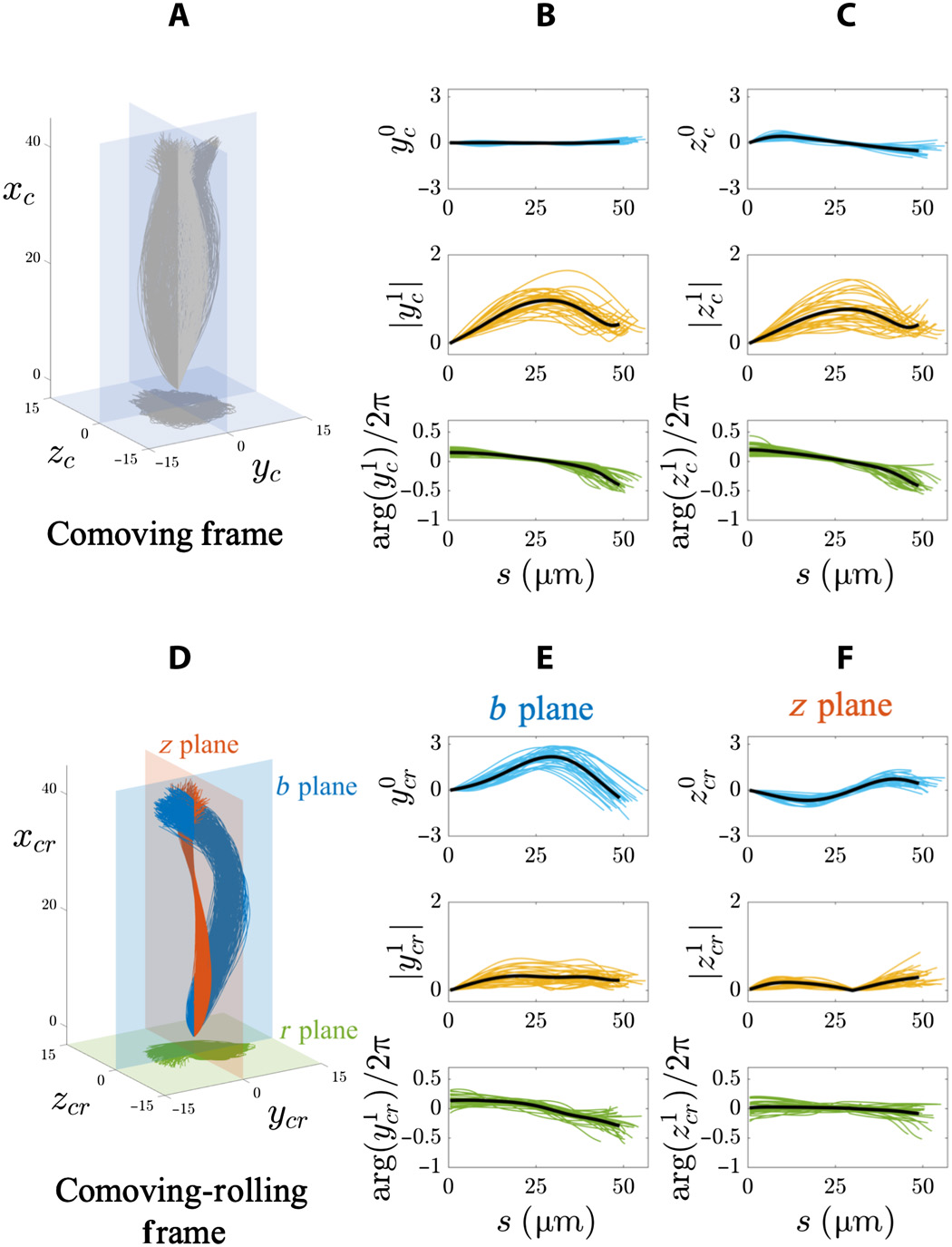
上面的图显示了自由漂浮的精子群(盖玻片旁边的20个细胞和远离玻璃杯的8个细胞)中3D鞭毛瓣的傅里叶分析结果。在随附的参考系(4A - 4C)中,由于扫描的对称性,两个方向(y c和z c)上的静态模式的振幅非常小(4B和4C处的曲线图的上排)。
此外,动态模式(y c和z c)在4B和4C时的幅度(中间行)和相位(底部行)由于精子围绕运动轴旋转,因此在该参考系中固定了横向对称并超过了各向同性。对于所有自由浮动单元
,两个坐标(y c和z c)的行波特性都相同:频率4 Hz,波长100μm和波速400μm/ s。
在随附的滚动参考系统(4D - 4F)中,b和z平面上的不同静态模式显示,挥杆在自由浮动细胞群体(4E和4F)中仍然具有各向异性。
静态模式b平面(y cr)非常不对称,并且偏向正值(4E在图的最上面一行)。但是对于z平面(z cr),它沿弧的长度以正弦形式对称振动(顶行为4F)。b平面(y 1 cr)
中的动态状态的振幅增加直到达到平稳状态(4E处的中间行),而z平面(z 1 cr)中的动态状态沿弧长的方向是非单调的(4F中处)行波特性y cr(b平面)分别为:频率8 Hz,波长145μm和波速1120μm/ s。行波z cr(z平面)的特性:频率6 Hz,波长1526μm,速度5174μm/ s。
沿着鞭毛整个长度的较大距离处的相位变化很小,需要非常高的波传播速度。因此,z平面的振荡实际上就像是随时间脉动的驻波。
显微镜下的非推动性和滚动性精子。
以上数据的总体表明鞭毛扑动使用了两个共同的各向异性横向控制,这与行进的电磁波没有太大的不同。但是,每个剪切波(y cr,z cr)是静态模式和动态模式的总和:沿着b平面的非对称行波(在4D处为蓝色)和在z平面上的对称驻波(在4D处为红色)。
奇怪(但并不奇怪),靠近精子细胞轨迹的盖玻片的存在也会影响波传播的幅度。

Image No. 5
玻璃由于鞭毛和盖玻片的硬表面之间的流体动力相互作用,降低了波传播的幅度。
在随附的参考系(5A和5B)中,两个动态模式(y c,z c)的振幅都朝着靠近盖玻片的精子鞭毛末端减小(中心图),而静态模式保持不变(图形最佳)。在中心图5A和5B中
,动态模式z c仅略小于y c(蓝色曲线)。这与两者(yc,z c)远离玻璃杯检测到的精子动态模式(中心5A和5B中的红色曲线)。
如果我们注意附带的滚动参考系统,则玻璃效果的性质非常各向异性,因为它仅影响一个滚动平面,即在b平面上(5C)。
盖玻片同时影响静态和动态y cr模式(上图和中部5C处的图)。但是z平面(z cr)保持不变(图形在顶部,在5D处居中)。
伴生滚动参考系中静态模式的形状在所有精子中均相同,并定义了一个偏心的右侧螺旋线,由h(s)表示,并由5E处的黑色曲线表示。螺旋线在滚动平面(绿色平面)上的投影是没有极性对称的逆时针螺旋线,即向一侧偏移(5E处的灰色投影)。
静态模式螺旋非常类似于自然界中经常发现的对数螺旋。但是,在这种情况下,螺旋的半径非单调变化,以比自然界其他地方的对数螺旋更快的速率增加/减小。5E时的
右对数螺旋h(s)可以用半径和螺距(5G)表示,该半径和螺距沿鞭毛的长度呈指数衰减。 h y或h z的符号的任何变化都会使螺旋线切换为顺时针旋转,从而创建左旋螺旋线。所有自由漂浮的精子均产生逆时针螺旋。尽管形状与5E相同,但只有两个精子具有顺时针螺旋。正是这两个单元由于路径上的障碍而无法向前游泳,但是它们可以继续绕着自己的扭转轴旋转。
在所有情况下,螺旋的旋转都与精子滚动的方向相关,如下所示:逆时针螺旋用于顺时针旋转(从后端看),顺时针螺旋用于逆时针旋转。
图像#6
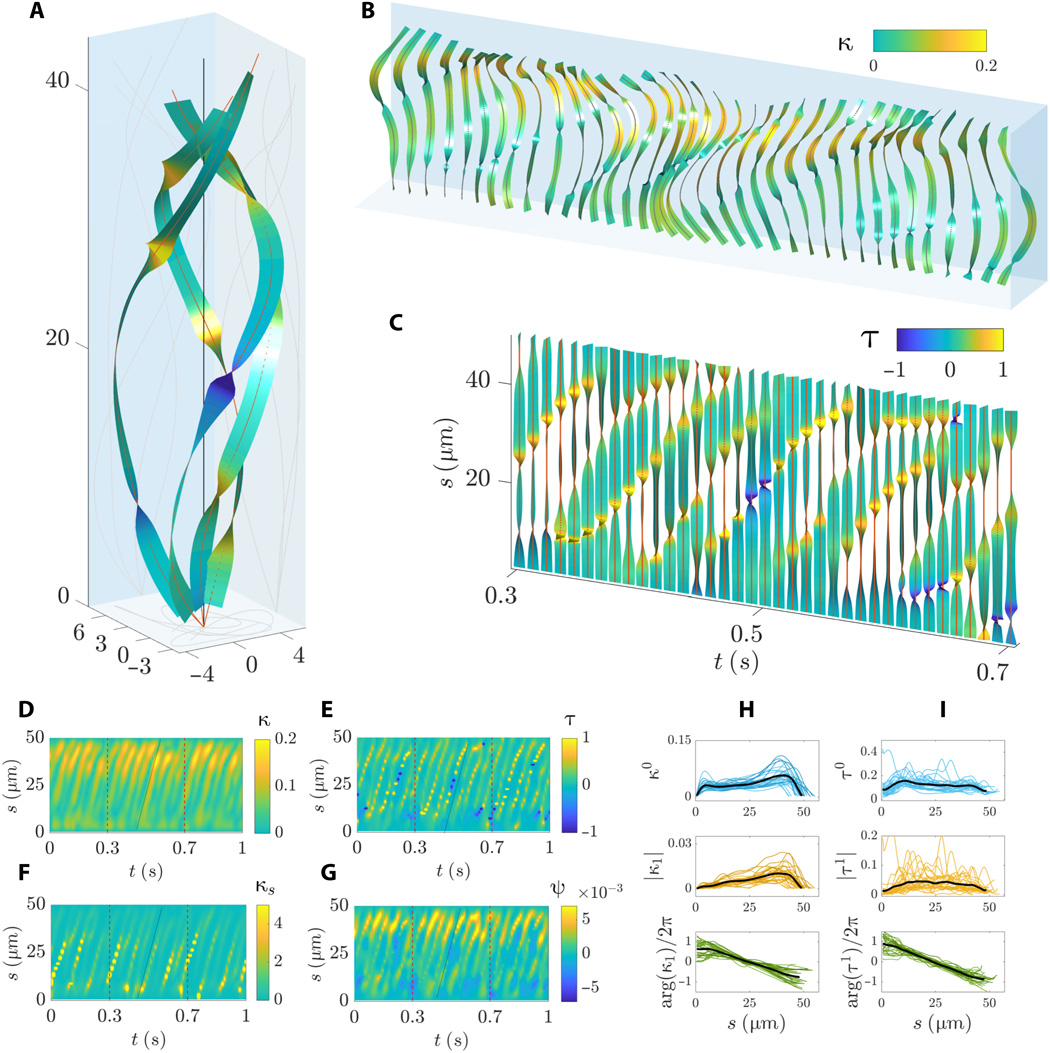
图6A和6B显示了鞭毛绕其滚动轴旋转时行波的复杂序列。弯曲波沿着鞭毛线性传播,并沿弧长呈非单调振幅,其特征是中部和远端区域急剧增加。
波形的扭曲特征在于沿电弧长度的急剧弯曲(6B和6C),同时具有正转和负转。鞭毛中心线的螺旋形状经历了这样的现象,即沿着鞭毛手性相反的区域共存。然而,具有相反手性的鞭毛部分在拍打过程中会移动(6C和6E)。行进的扭转波以与曲率波相同的速度传播。
图片#7
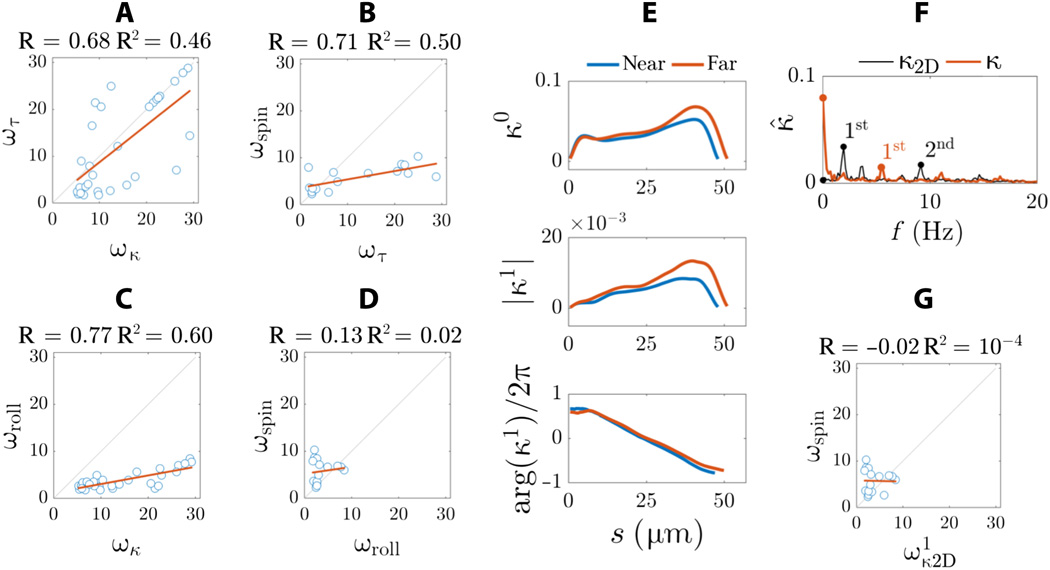
为了更好地理解本研究中获得的3D显微镜结果与文献中经常描述的2D显微镜结果之间的差异,科学家从3D波形中创建了2D投影。
二维曲率的静态范围很小(7F)。在2D模式下,无法检测到波形的固有不对称性。相反,频谱的特征在于两个频率峰值(7F处的黑色标记),而不是三维曲率(7F处的红色曲线)看到的一个主要频率峰值。
要更详尽地了解这项研究的细微差别,建议您研究一下科学家的报告和其他材料。
结语
在这项工作中,科学家们能够在实践中证明,由于采用了三维显微镜,因此有可能找出二维显微镜无法提供的东西-例如,观察鞭毛振荡期间螺旋方向的变化(手性的变化)。
乍一看,似乎精子只是向前浮动,摇着它们的尾巴。但是,对这些细胞的运动学的详细检查表明,此过程要复杂得多。鞭毛的拍打和摇摆,细胞本身的旋转-所有这些共同使精子向前移动。
此信息中的一些以前可用,但由于2D显微镜的局限性,因此并非所有详细信息都已详述。科学家说,了解精子的移动方式对生殖医学领域大有帮助。特别是,新数据将扩大确定男性不健康性细胞的参数范围,这是大约一半夫妇不孕的原因。
在任何情况下,我们对某些现象和过程,尤其是在我们自己体内发生的现象和过程的了解越多,改善我们生活质量的可能性就越大。
谢谢大家的关注,保持好奇心,祝您一周工作愉快。:)
一点广告
感谢您与我们在一起。你喜欢我们的文章吗?想看更多有趣的内容吗?通过下订单或向朋友推荐,为开发人员提供云VPS,最低价格为4.99美元,这是我们为您发明的入门级服务器 的独特类似物:关于VPS(KVM)E5-2697 v3(6核)的全部真相10GB DDR4 480GB SSD 1Gbps从$ 19还是如何正确划分服务器?(RAID1和RAID10可用的选件,最多24个内核和最多40GB DDR4)。
阿姆斯特丹的Equinix Tier IV数据中心的Dell R730xd 2x是否便宜?仅在荷兰有2台Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100电视!戴尔R420-2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB-$ 99起!阅读有关如何构建bldg的基础结构的信息。戴尔R730xd E5-2650 v4服务器上的价格为9000欧元的价格?