这种方法允许使用CAD程序进行逼真的建模,这是整个系统中光线追踪不一致的方法,用于评估形成眩光的耀斑。另外,该方法允许避免渐晕并使像差最小化,这在使用通用附件时经常会遇到,该现象以任意方式计算,而无需考虑所使用的镜头的设计特征。同样,该方法使得有可能考虑到附件的所需位置的提供而正确地设计相机附件的结构,在该位置处镜头和附件的光学系统的出射光瞳和入射光瞳完全匹配。

1.简介
无焦点变形(或圆柱)附件是由圆柱透镜组成的光学系统,该透镜设计成通过减小透镜的焦距来光学地变换图像。焦距的减小与在给定的,通常是水平的方向上的透镜的视场的期望的增大相关。附件将正方形转换为矩形或将一个长宽比的矩形转换为长宽比不同的矩形。例如,要将帧的宽高比从4:3更改为16:9。
变形镜头会生成压缩图像,然后使用嵌入式应用程序中实现的数字图像处理(解压缩)将其转换为广角图像。

首先,变形镜头能够扩展角场。

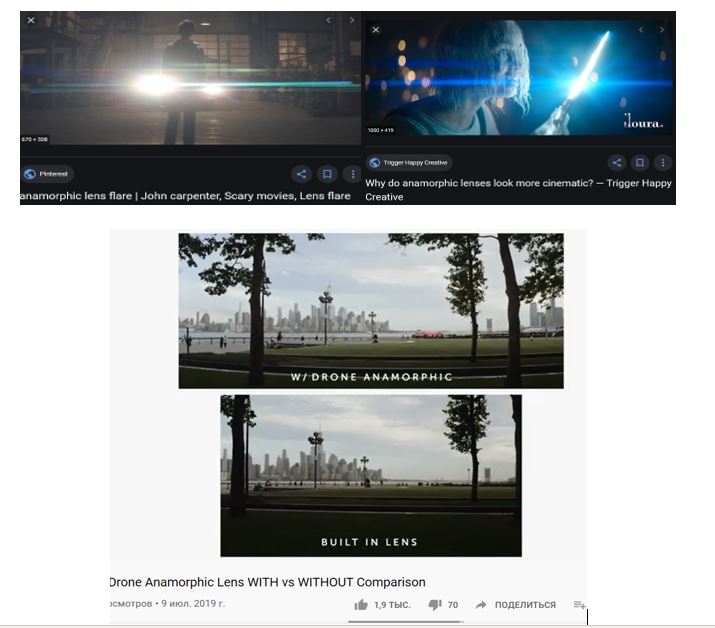
借助此附件,您可以极大地改变和美化使用智能手机,无人机,GoPro相机和紧凑型数码相机拍摄的照片,从而创造出独特的特殊效果。产生了扩大框架中空间的效果,改变了视角,出现了特殊的光学效果-来自明亮光源的持续眩光。所有这些形成了所传输图像的特殊表现力,即超现实主义,模仿了在大型电影院中通常使用的专业昂贵和高质量镜头上拍摄的效果。这是由于附件的光学系统的特殊设计。
2.变形附件的主要光学特性
附件是安装在镜头前的紧凑型光学系统,它成为光学系统的一部分。
附件的光学系统的设计方式是,在显示圆柱面曲率的一个部分中,附件充当传统的球形透镜系统,而在另一垂直于其的地方,充当平面平行板系统。
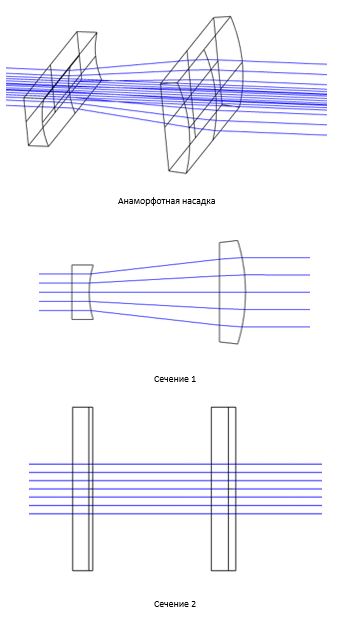
大多数附件都有两个组件。为确保紧凑性,根据伽利略望远镜的使用,望远镜的圆柱系统安装在主要部分中。它将进入系统的平行光束在系统出口处转换为相同的平行光束,但在两个相互垂直的部分中与光轴的角度不同。根据其作用,该附件仅导致其所使用的镜头的焦距在一个方向上发生变化,而在另一个方向上,该附件在没有屈光力且不改变焦距的情况下工作。在图1中,它们分别标记为L1和L2。为了紧凑,第一
负分量L1的前虚拟焦点F1与第二负分量L2的后焦点F'2重合。
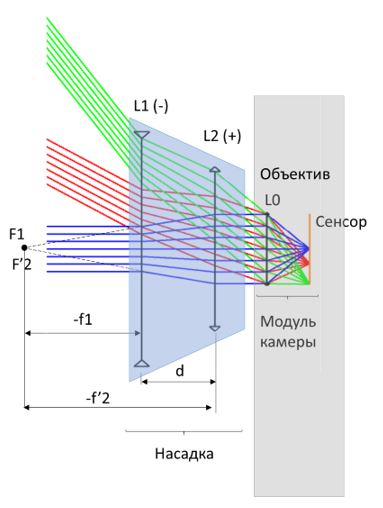
在主(水平)部分具有附件的镜头的焦距由以下公式确定:
其中f0是摄像机镜头的焦距,-f1和f2是变形附件的第一个负分量和第二个正分量的焦距。在主要部分中,图像比例会根据望远镜系统的视在放大倍数而变化,而在其他部分中,图像比例将保持不变。这意味着附件的变形系数A等于附件组件的焦距绝对值的比值:
附件组件之间的距离d等于组件焦距的绝对值之差:
3.设计光学系统的主要阶段
设备的光学系统(如无焦点附件)的开发通常包括以下主要步骤:
- 确定主要的光学特性和尺寸限制(准备技术规格);
- 尺寸和光能计算;
- 像差计算或寻找最接近的原型;
- 使用光学软件(CodeV,Zemax Optics studio)优化光学系统;
- 质量分析,计算设计参数偏差的公差;
进一步的发展通常经历以下几个阶段:
- 开发外壳设计(光机械设计)以及将附件连接到智能手机(外壳或夹子)的设计;
- 准备光学和机械零件的图纸,并制作第一个原型的设计文件。
- 原型制造和测试,光学系统和设计的变更。准备制造原型的设计文件2。
- 原型制造v.2。与朋友,测试人员等进行高级测试 现代化。最小化生产成本(更便宜的眼镜,材料等)。
- 开发我们自己的图像处理软件(可选)。
- 准备量产。优化。
- 开始量产。
- 扩展术语。
为了估算在此类设备的开发生命周期上花费的时间,网络发布了其中一家初创公司的时间表,在kickstarter上进行了讨论。

4.变形附件光学系统的计算
让我们在第一部分更详细地讨论光学设计。
尺寸计算
光学设计初期的一个重要方面是主透镜设计参数的可用性,为此可计算出变形附件。通常可以将以公司名称找到的专利用作起点。
作为初始光学系统,我们采用了基于智能手机正面13百万像素相机的F1.8快速镜头的系统,其光学方案和设计参数如下所示。
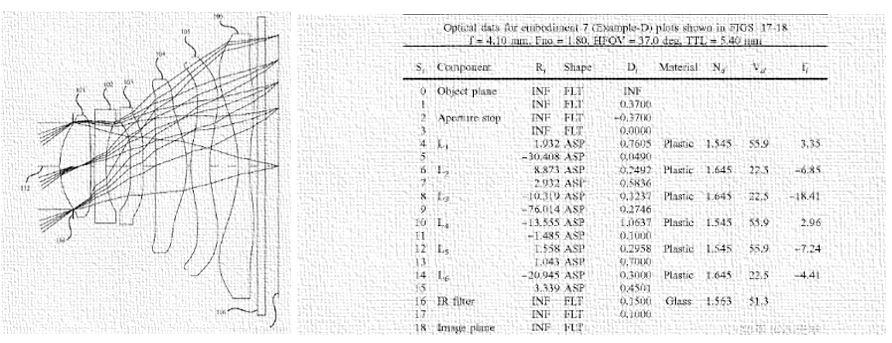
此外,有关系统主要几何参数和设计参数的初始数据已传输到Zemax Optics Studio程序,结果得到了系统:

请注意,物镜是由塑料制成的,具有复杂的非球面表面形状,这是一个高阶非球面,由二阶变形非球面方程式描述,它使用了表面上均匀的径向坐标度下的变形系数:

相机本身的主要光学特性具有以下值:
- 智能手机相机镜头的焦距为f'0 = 4.1毫米。
- 相对光圈: ...
- 入瞳直径为 毫米
- 入瞳位置:镜头的入射光瞳与安装在第一个物镜镜筒上的光圈匹配 毫米
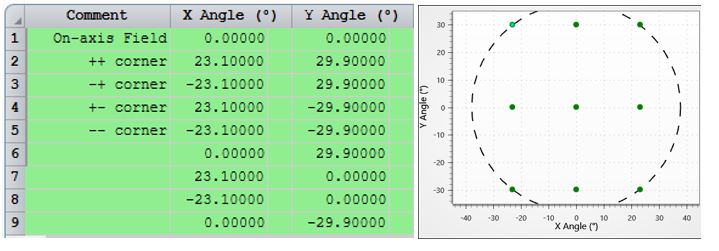
- 不带附件的智能手机相机镜头的视场为:
- 沿镜头对角线的总视野为71.2°。
- Diag=5. 867mm, (aspect ratio): 4:3.
- 13MP. : 1.12 um.
让我们取无焦点附件的变形系数的值A = 0.67。变形率决定了图像中坐标的水平压缩率。那些。在我们的例子中,水平坐标压缩了33%。
让我们设置附件组件的焦距的以下值f1 = -13.4 mm(负透镜),f2 = -f1 / A = 13.4 mm / 0.67 = 20 mm(正透镜),附件组件之间的距离等于组件的焦距之和:d = f2 + f1 = 20毫米+(-13.4)毫米= 6.6毫米。结果,[镜头] + [附件]系统的焦距在一个部分(垂直)中不会改变,并且将等于4.1mm镜头的焦距;在水平部分中,焦距将减小并变为:
带有附件的镜头的视场在水平面中增加,并通过以下公式计算:
,
其中A是镜头变形系数。
结果是:
带有附件的智能手机相机镜头的视场会增加以下值:
接下来,对由两个成分组成的光学系统进行像差计算和优化。
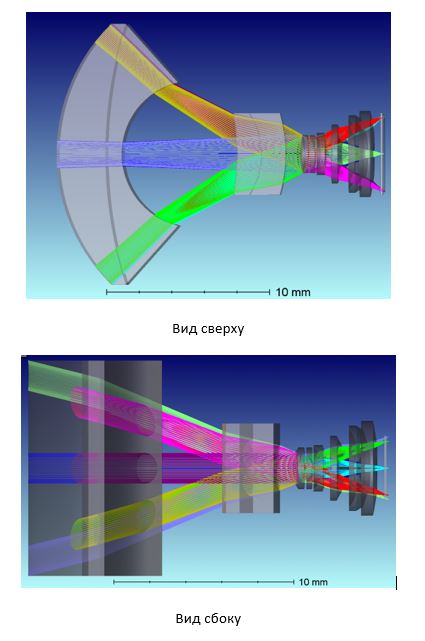
结果是一个光学系统,由两个双透镜粘合的圆柱组件组成。
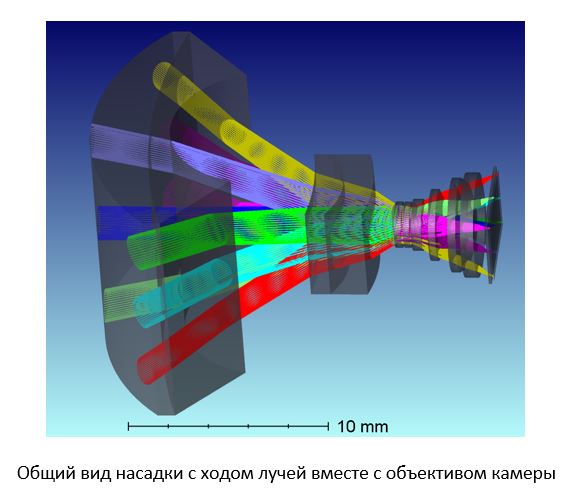
喷嘴的主要特点:
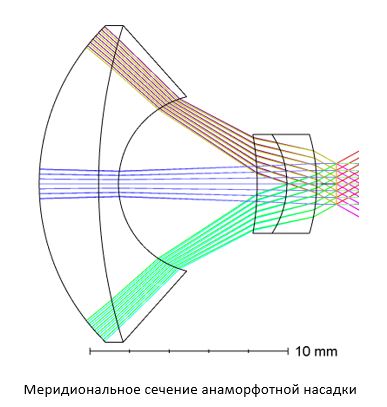
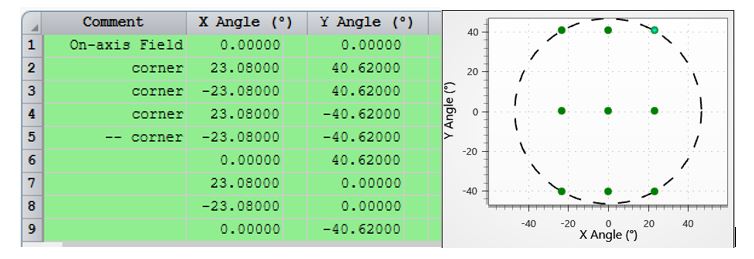
- 视角:
- 对角线视角:87.53°。
- 长宽比:16:9。
- 角倍率: ...
- 沿光轴的系统长度:L = 14mm
- 组件之间的气隙:d = 7毫米
- 第一组件孔径:16mm x12mm
- 第一组件厚度:4毫米
- 第二部分厚度:3毫米
5.
提出了一种计算变形的无焦点附着在紧凑型相机镜头上的方法。喷嘴由两个粘合在一起的双透镜圆柱组件组成。为确保紧凑性,根据伽利略望远镜的使用,望远镜的圆柱系统安装在主要部分中。该系统的正面组件是短焦距,它具有负光焦度,第二个组件具有正焦度。在这种情况下,第一分量的前虚拟焦点与第二分量的后焦点一致。系统的出瞳位于附件的后面,并与紧凑型相机镜头的出瞳对准。系统的长度不超过第一部件的最大横向尺寸。粘合的前组件镜片的玻璃厚度不超过系统总长度的30%。根据作者的说法,这种方法可确保精确匹配系统的光瞳,并在减小喷嘴尺寸和重量的同时获得高图像质量。