量子技术正在广泛的领域帮助我们。例如,当我们需要测量一个非常微弱的信号时,系统中的量子噪声就会成为障碍。这是传统的问题,例如在重力波检测器中,其中用于测量反射镜位置的激光的幅度和相位的量子波动会干扰重力波的观测。我在有关爱因斯坦望远镜探测器的文章中谈到了这一点,该探测器将在不久的将来出现在欧洲。
在我们的实验中,我们得到了这种检测器的小型原型。
今天发布了有关该实验的文章预印本:低温冷却的微机械膜上的挤压光干涉法。
1.简介
科学家很乐意研究自然界中许多弱小的力量。
问题是我们不能直接测量力,而只能观察它对不同物体的作用。
测量力最简单,最有效的方法是使用摆锤。力使钟摆运动,我们测量该位移。当力的频率接近摆的共振频率时,位移会大大增强,并且可以观察到良好的信号。
使用光来测量摆的位移很方便。当我们将激光照射在覆盖有反射物质的钟摆上时,反射光的相位包含有关钟摆位移的信息。
我们不能直接观察光的相位,为此我们需要一个干涉仪。

迈克尔逊干涉仪:激光束由分束器分成两个相等的部分,由可移动镜反射,并在那里获取相位以及位移信息。返回到分束器后,光束的不同相位会发生干扰(振幅相加或相减),并且在输出处我们看到与镜面位移成比例的信号。
重力波探测器不仅适用于此原理,而且大多数传感器也适用。
不幸的是,除了这种检测器中的信号之外,还会有许多其他噪声源。
我在有关爱因斯坦望远镜探测器的文章中写了其中一些,但是在这里我将只限于两个。
1.热噪声
让我们想象一下一个摆锤,就像一个被绳子悬挂的镜子。
分子在该线程中的热布朗运动导致激发反射镜的振动。该运动原则上是随机的,并且可以表示为以不同频率作用在反射镜上的力。在接近钟摆共振的频率处,该力导致反射镜位移的共振增加。尽管热力的频谱是白色的(即在所有频率下热力都是相同的),但在测量反射镜运动的频谱时,我们会在共振频率处看到一个特征峰。
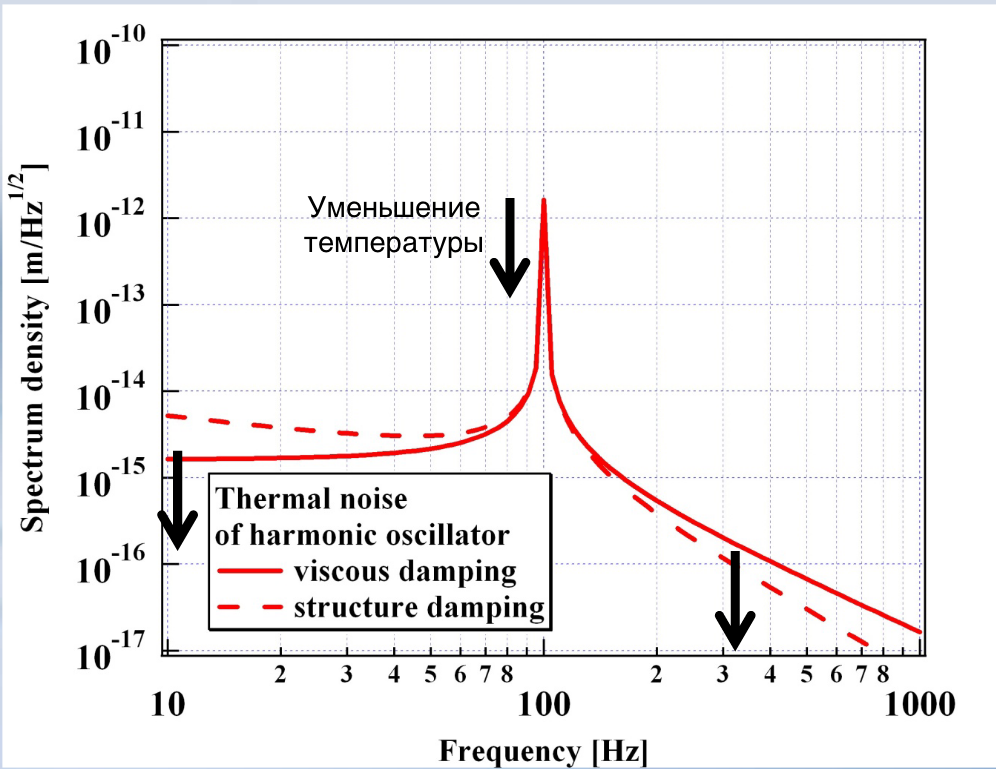
热噪声谱:由于不同频率的热噪声而引起的摆的位移。温度越低,噪音越小。从这里被盗。
热噪声取决于温度(温度越低,噪声越少)和线的质量(损耗量)。严格来说,存在一个将系统中观察到的噪声与耗散联系起来的波动耗散定理。
因此,在未来的重力波探测器中,将通过两种方式来消除这种噪声:通过冷却悬架(和反射镜)并提高其质量。在我们的实验中,我们观察到了热噪声频谱,并通过冷却降低了噪声频谱,但以下内容对此进行了详细介绍。
2.量子散粒噪声
光具有量子性质,单个光子以不同的随机延迟飞行。换句话说,光束的相位证明是随机的。
当我们尝试从外力测量相位信号时,会受到此相位不确定性的限制。在检测器上,我们看到白光谱噪声,这实际上是测量精度的基本限制。所有检测器仅限于散粒噪声。尽管具有基本性质,但可以使用量子相关性来减少这种噪声。
为此,您需要记住一些量子力学。相位不确定性和激光振幅不确定性由海森堡关系引起:
在常规的激光束中,这些不确定性是相等的。但是,可以通过增加幅度不确定度来压缩相位不确定度-主要是它们的乘积满足不确定度关系。这种光称为G度压缩:
我们将使用这种技巧来压缩相位不确定性,从而使我们能够更好地观察信号。顺便说一句,重力波探测器已经将挤压光用于所有最近的观测。直到最近,我们还进行了一个实验,我们在这种挤压的灯光下玩耍,而我在《哈布雷》(Habré)上对此进行了描述。
因此,了解了基础知识之后,我们继续进行实验。
2.我们的干涉仪
在我们的实验中,我们使用了一个侧面为1 mm,厚度仅为50 nm的小薄膜作为摆。
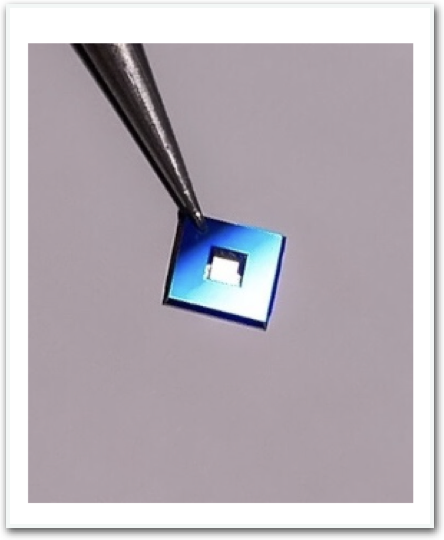

左:膜的照片(灰色框中央的小窗口)。膜像鼓一样在框架上拉伸并在内部振动。右:膜位移的图示。
这种膜以约400 kHz的频率振荡,其Q因子(能量损失一半之前的振荡次数)约为10 5。为此,必须将其放置在真空中,否则空气会对其施加过多压力,并且不会振动。
它也是相当透明的:其反射率仅为20%。
这不是很方便,因为如果在迈克尔逊干涉仪中使用这种膜,则会丢失大部分信号。更糟糕的是,当我们要使用压缩光时,这些量子相关性也会丢失,并且对丢失特别敏感。因此,我们决定使用干涉仪的不同配置,“折叠”迈克尔逊干涉仪的两个臂,以使两个反射镜合而为一-我们的膜。
在这样的干涉仪中,有两种模式:一部分光穿过膜,并直接离开干涉仪而没有任何信号(这是Sagnac模式)。另一部分被反射并获得与膜的位移成比例的相位,并且我们在干涉仪的输出端接收到信号。

迈克尔逊-萨格纳克干涉仪
干涉仪的主要困难之一是其调整:理想情况下,光必须在中央分束器处交叠,否则不会发生干涉,并且我们会失去灵敏度和压缩光。当干涉仪位于真空室或低温恒温器内部时,这尤其困难。为了使干涉仪尽可能稳定,我们用一块具有低热膨胀系数的材料制成了干涉仪,并对其形状进行了优化,以使其在冷却时不会变形。它还镀有金,以尽可能地使其与外界的热辐射隔离。我们将此块放入低温恒温器中,可以将其冷却到20K(-253C)。
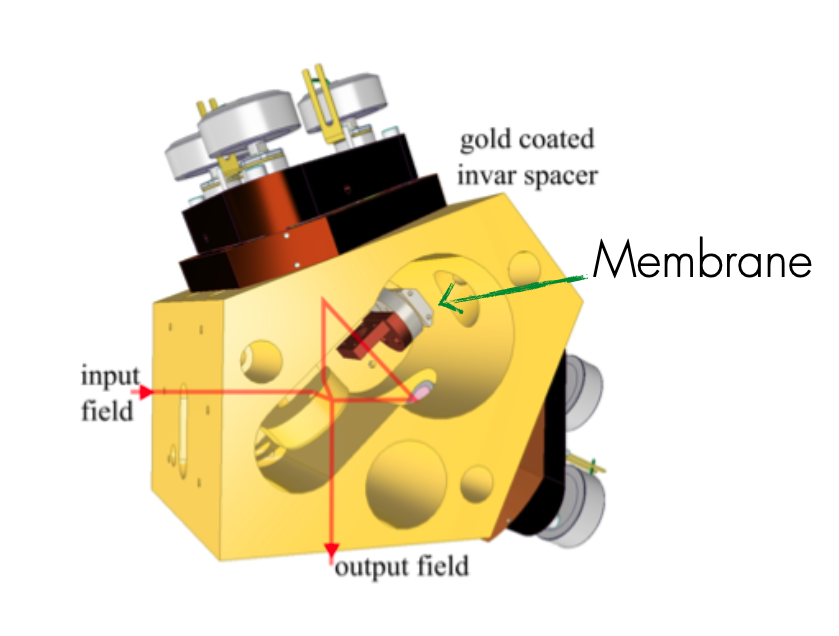
干涉仪的示意图
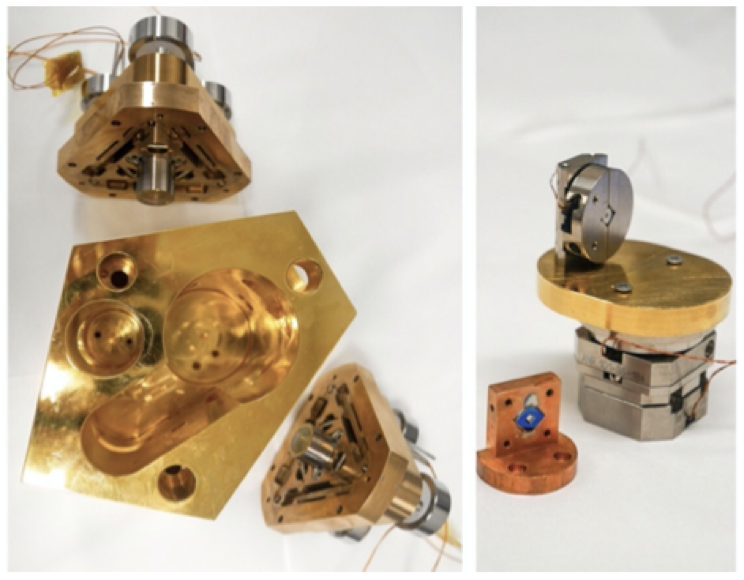
干涉仪的分解照片:左侧-干涉仪和压电马达在低温下移动反射镜。右边是支架中的薄膜。
3.压缩光
我建议阅读有关哈布雷(Habré)的文章,这是对光的压缩状态的出色介绍。
压缩光可以通过不同的方式产生,我们使用的是非线性晶体。
当晶体用光子泵浦时,非线性过程会导致一个泵浦光子产生的两个光子的能量(频率)为泵浦光子的一半。这些光子发现自己处于量子纠缠态。这种成对的光子流比普通光流更有序,因为 散粒噪声降低-压缩效果。
在这种情况下,通过增加幅度不确定度,可以将相位不确定度减小到零。您可以做相反的事情,减少幅度不确定性。在我们的实验中,我们不是压缩光本身,而是压缩场零状态的量子涨落(即所谓的真空涨落)。对于这样的压缩真空,平均振幅为零,并且只有相位和振幅不确定性。

. . () (). () : , . ( ). .
在实验中,我们首先使用非线性过程创建泵浦光束,将波长从1550nm减小到775nm(SHG),然后使用该泵浦压缩1550nm波长的真空波动。然后,我们在干涉仪中测量所得的光,使其与分频器上的激光束对准。这种方法称为零差检测。

在此实验中,干涉仪的输入处大约有8.7 dB的压缩(降噪了7.5倍),但一般来说,我们现在可以做得更强,达到30倍(15 dB)。就像我在上面写的,压缩光非常容易受到光损耗的影响,而灵敏度的提高并不是那么明显(4.8dB)。
样本数据

零差检测器的相位会定期变化,因此我们可以观察到压缩和反压缩的光,如绿色曲线所示。紫色线是光的真空状态的散粒噪声级别。
零差检测器的相位会定期变化,因此我们可以观察到压缩和反压缩的光,如绿色曲线所示。紫色线是光的真空状态的散粒噪声级别。
4.放在一起
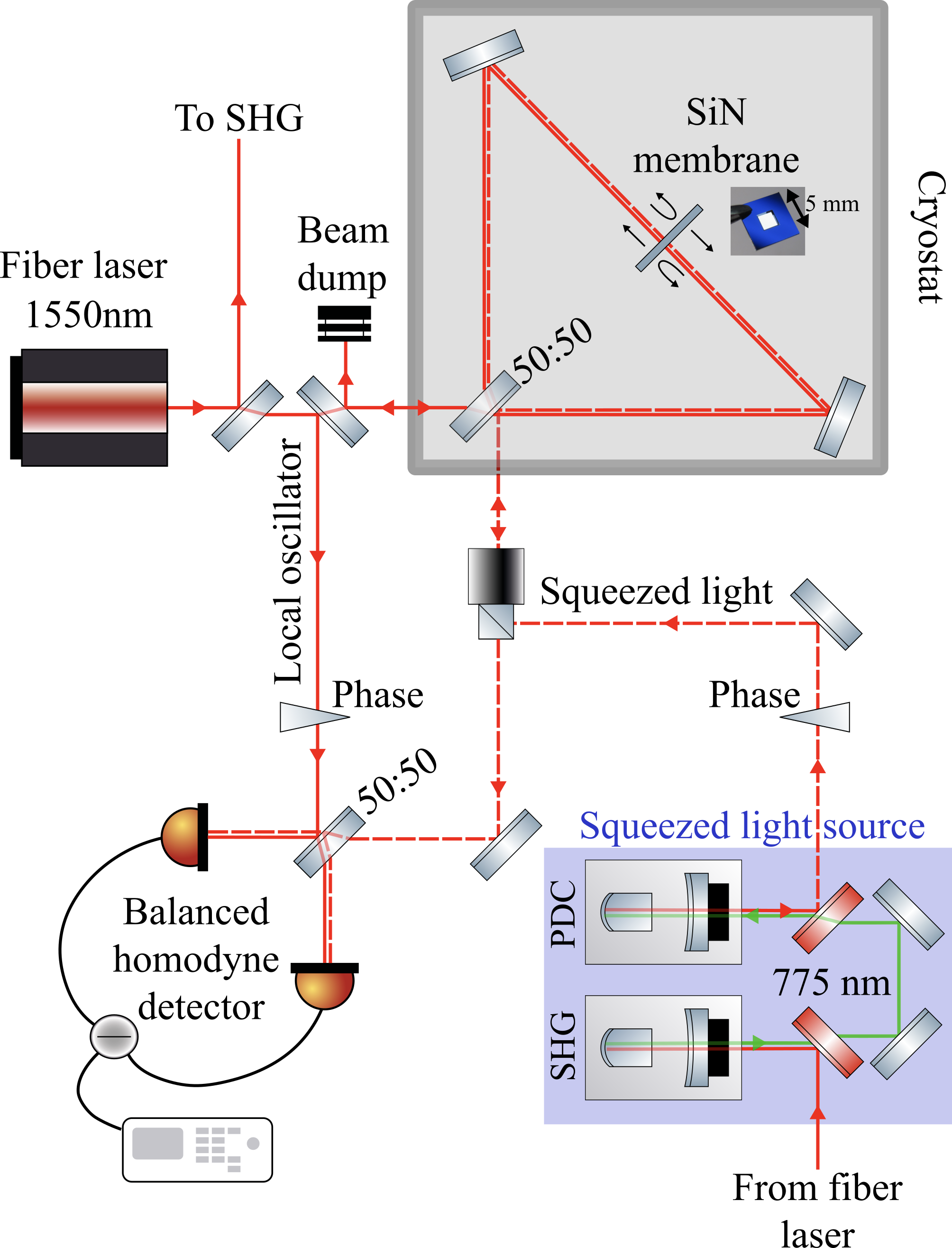
我们将压缩光从信号端口发送到干涉仪中。它穿过干涉仪,并与来自薄膜运动的信号一起返回。两者都指向零差检测器。
必须监视光的所有相位:谐振器必须保持与主光束谐振,被压缩的光的相位必须与信号的相位匹配,干涉仪必须保持正确调谐,零差探测器必须测量正确的相位。
结果,它们总共占据一个大房间:

更多图片
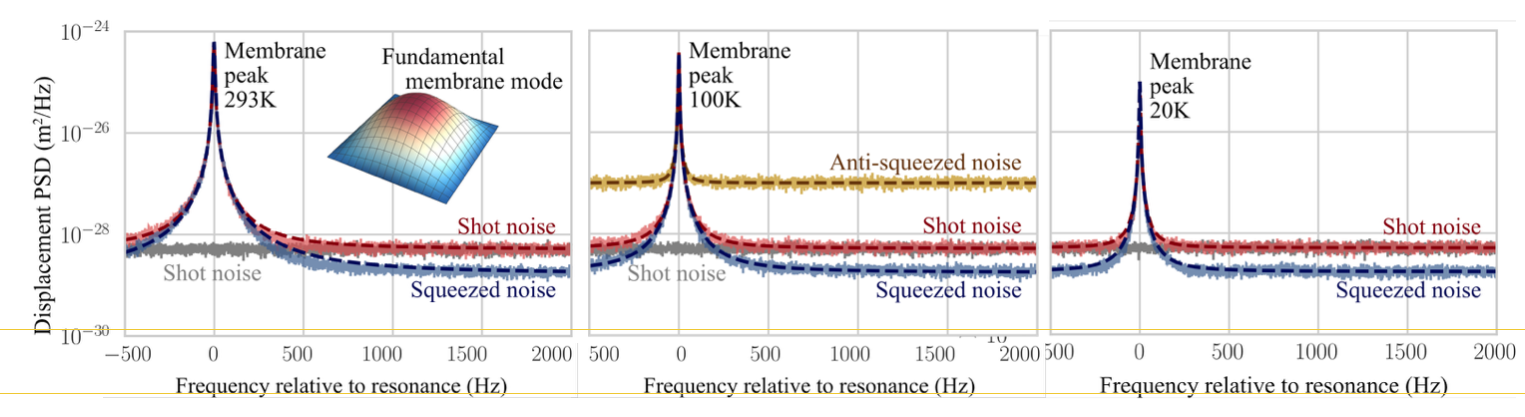
结果,我们能够观察到膜的热运动并将其冷却到100K到20K。这种冷却可以在其运动范围内直接观察到:随着温度的降低,噪音也降低了。另一方面,我们使用压缩光,并且将散粒噪声抑制了三倍。结果是一个原型重力波检测器,其中我们首次将冷却的干涉仪与量子压缩相结合。
最重要的是,我们证明了在冷却到低温时可以保持干涉仪的调谐,并且不会引入会降低系统中量子相关程度的损耗。
大部分工作是由我们实验室的一名研究生完成的(照片大部分来自她的论文)。我们经过6年多的时间才得出此结果,所有内容都适合本文的4页。这就是我们在量子光学实验室花费时间的方式。下次,我将向您介绍另一个实验,并展示更多光学元件和任何hikporn内部元件。
低温冷却微机械膜上的挤压光干涉法
最后但并非最不重要的一点,如果您想看着我尝试弄清楚如何用英语进行科学Twitter,欢迎使用@hbar_universe。