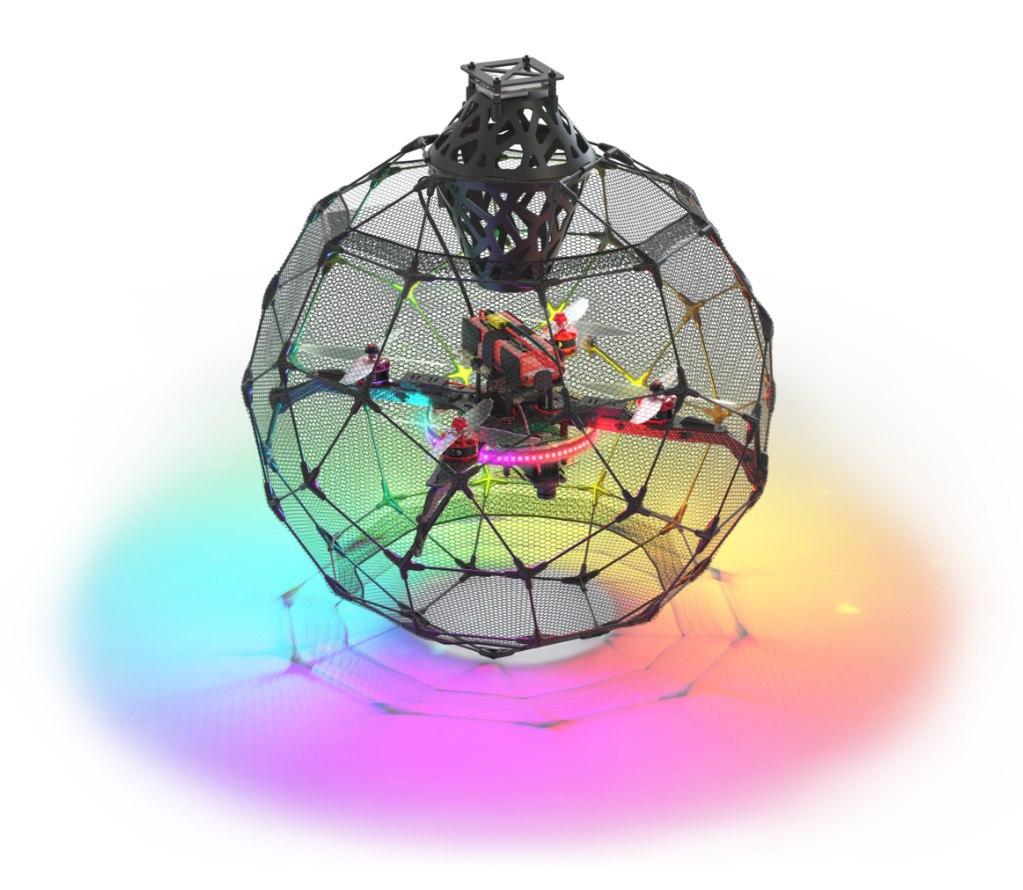
非常有争议,非常不寻常,很奇怪,但是可以!在建筑,交叉机器人和无人飞行器的交汇处。简介:Tensodrone™。

Tensodrone(Tensodron)-一种多旋翼无人驾驶飞行器(UAV),其新设计具有防撞保护功能,是基于张力原理制造的。这种方法通过结合保护罩和结构框架设计,以更轻的重量提高了抗冲击性。
该项目是在Innopolis大学的基础上,在“机器人技术和机电一体化组件技术”的指导下,NTI能力中心各个团队互动的生动例子。
无人机坠落

来源
只是因为它们飞翔。控制系统,电动机,传感器,自动驾驶仪,机载计算机和软件-开发人员试图尽可能可靠地完成所有这些工作,但仍有使直升机坠毁的风险。如果这是一个原型,则需要一次制造多个(几件或几件?)进行调试。除了内部因素,显然,外部因素仍然存在:风,被动障碍,主动影响。
几乎没有人会争辩说,无人机坠落,碰撞,倾覆。
您可以尝试避免这种情况,可以为此做准备。有什么更好的?由开发人员,用户和立法者决定。
我赞成同时使用这两种方法。但是在本文中,我们将集中于如何避免无人机坠落或碰撞的后果。
防护结构
避免无人机坠落或碰撞后果的最直接方法是使用防护笼和其他防护结构。这里有两项任务-保护无人机不受损害,保护无人机运行所在的环境以及无人机中的人员。
该设计的基本版本是螺旋桨护罩,它更可能使人免受无人机的伤害。

带螺旋桨护罩的AR.Drone 2.0无人机。来源
还有由Dario Floreano教授在EPFL团队开发的具有折纸启发性的有趣解决方案,其中包括可折叠的柔性螺旋桨护罩(甚至框架设计)。
保护无人机本身(同时保护人们免受无人机攻击)的主要设计是防护笼。四轴飞行器本身在笼子里。
无人驾驶飞机俄罗斯COEX
公司生产的三叶草俄罗斯COEX公司生产用于训练目的的无人机,默认情况下,它具有螺旋桨护罩和(可选)防护罩。
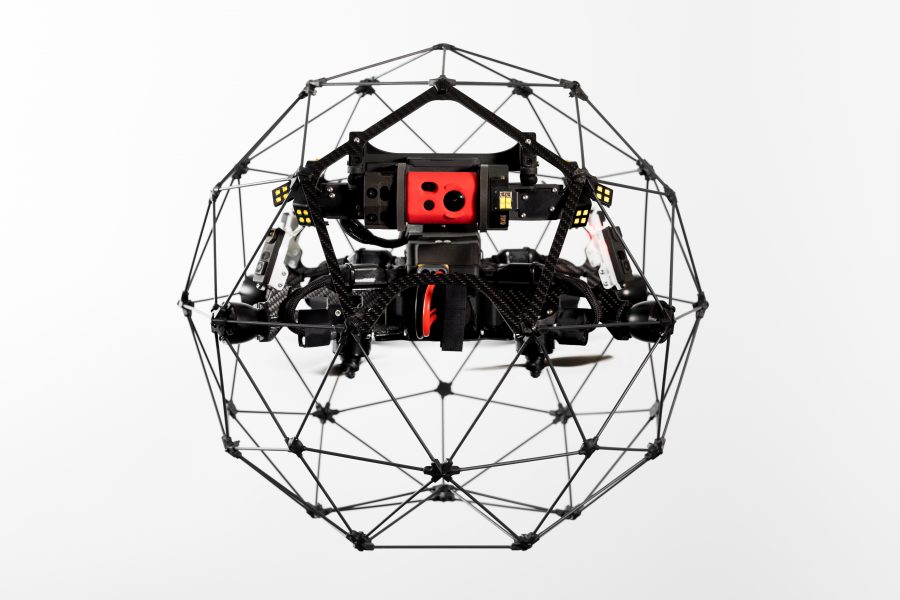
无人机可飞行性ELIOS
瑞士(瑞士-首府dronostroeniya?)可飞行性公司-生产在商业上最成功的直升飞机ELIOS,带有保护罩,可在场所内进行检查。设计的独创性在于将保护罩固定在可移动悬架上的直升飞机框架上,并具有稳定的可能性。

无人机Dronistics EPFL
初创公司Dronistics(又是瑞士的Dario Floreano集团)提供一种带有可折叠笼子的无人机,以安全地运送货物。
还是休息

这种无人机的缺点是增加了结构的质量-您需要携带保护笼和无人机的附件。减轻保护结构重量的期望导致其强度降低。
具有可变几何形状的无人机
与坚固耐用的无人机的想法有关的另一个方向(不仅是)是折叠无人机和具有可变几何形状(可折叠和变形)的无人机。这是指无人机在飞行中改变其几何形状的能力。制成可折叠结构以避免损坏无人机(例如,无人机可以在撞击前“弯曲”),并且可以将无人机折叠成紧凑的尺寸,以便通过狭窄的窗户飞行。
您可能已经看过一段来自瑞士的可变几何无人机的精彩视频(是的,还是ETH + EPFL + UZH)。这个想法也很有趣并且很接近我们,我稍后会告诉您原因。
具有可变几何形状的无人机
张力
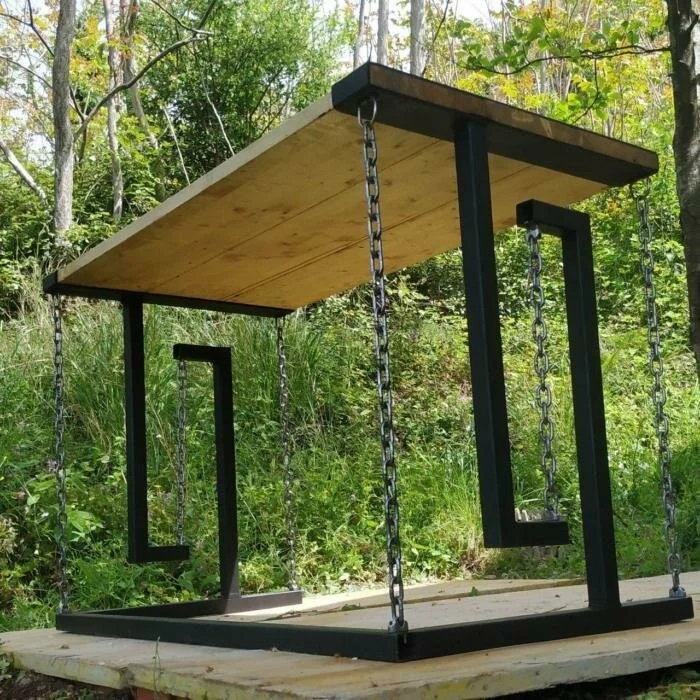
张力表。
Tensegrity的来源是框架结构利用压缩固体元素与拉伸复合材料相互作用的能力,以确保每个元素以最大的效率和经济性运行(Wiki)。该术语相对较新,出现在1960年代。上图中的桌子仅出于张紧原理站立(或悬挂),没有腿。
这种方法在建筑中有很多现代应用,从那里开始,主要是在桥梁设计中。

世界上最大的Tensegrity桥,澳大利亚。来源
替代用途:)
机器人技术的张力
机器人技术最古老的领域之一-工业机械手-现在正经历与所谓的相关的发展新阶段。协作机器人。在该领域的专家的讲话中,经常听到两个词-刚度和顺从性。
在工业机器人技术中,合规性是指灵活性和合规性。不顺从的,僵硬的机器人是一种设备,无论有什么外力作用在上面,它都可以工作。机器人的末端执行器每次都将遵循完全相同的路径。另一方面,顺应性机器人的末端执行器可以沿着不同的轨迹移动以完成任务,并向对象施加不同的力。例如,机器人可以抓住鸡蛋而不会压碎鸡蛋。受控的刚性是协作机器人技术的核心。
在机器人技术中使用张力的想法来自协作和“软”机器人技术。张力结构轻巧,耐冲击,可以控制其刚度(柔韧性)和构造(形状)。
关于张力在机器人技术中的应用的最著名的例子是NASA的Super Ball Bot,这是一种可折叠的地面机器人,计划将其用于探索行星表面。得益于电缆和绳索的球形结构,当机器人从太空飞船降落到行星上时,它可以承受从高处坠落的危险。一旦放在表面上,机器人就可以通过控制电缆和/或杆的长度向任何方向滚动。
NASA SUPERball v2上的IEEE Spectrum视频
Innopolis大学的Tensegrity机器人
在UI,我们开发了一种数学仪器,用于建模,设计和控制具有可变刚度(这是Tensegrity)的应力耦合结构的机器人系统。这是一项基本工作,可以在诸如张力操纵器或步行机器人之类的各种机器人中找到。
手势操纵器和UI Oleg的研究生兼研究员Ole Balakhnov
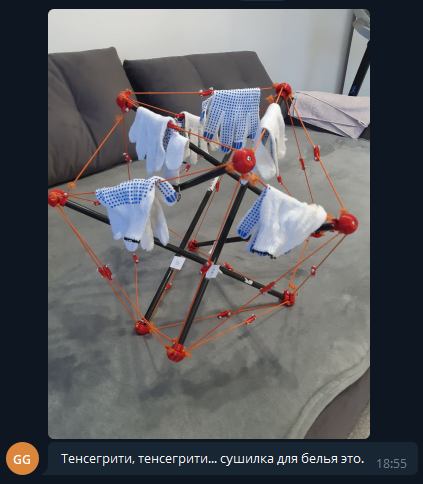
Oleg是第一个在这里开始制作张力机器人原型的人-首先是木棍和橡皮筋。寿司棒的结构照片也许还保留了聊天记录。
张力振动机器人
-
-
协同效应

你可能已经知道了
我有一架无人驾驶飞机,我很紧张。啊! (替硝酮)
进入我们的车库后,我经过了一个引人注目的奇特设计:
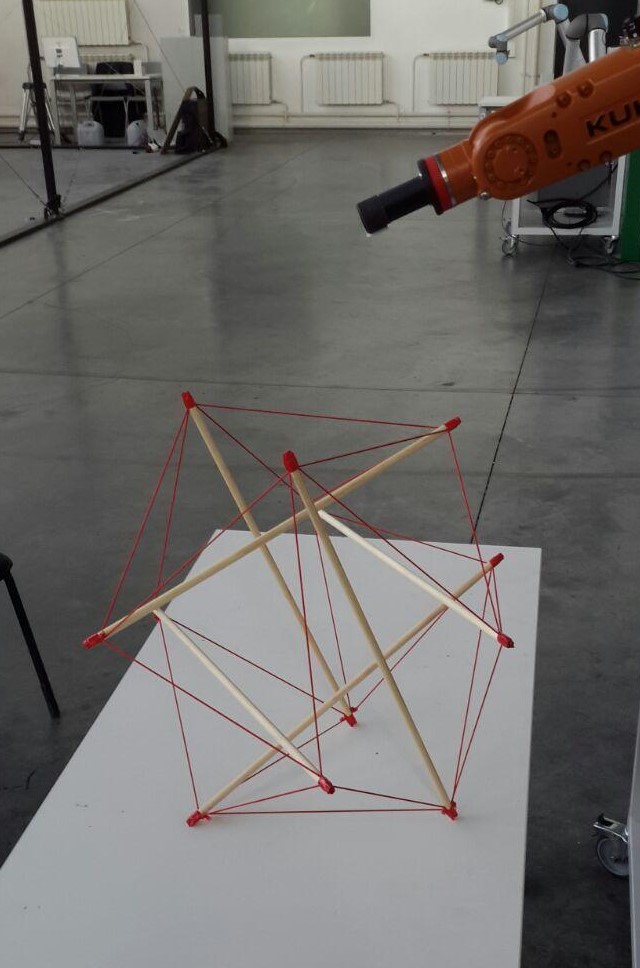
我问:“这是什么?” 有人告诉我:“一个无法杀死的结构-丢弃它,但它不会破裂。”
我摔断了(实际上只是干sh了-形状改变了,因为橡皮筋松动且未对准)。但是我们需要这样的无人机设计!然后我们开始了一个冒险的实验。
张力生存测试视频
更加艰难的考验
Squishy robotics — , - , ,
Squishy robotics — , - , ,
冒险

谢尔盖批准了这个冒险的实验。杰夫·贝佐斯(Jeff Bezos)还是
谢尔盖·萨文(Sergei Savin)-高级研究员,副教授,25年博士学位的认真科学家,并发表了许多评级出版物。他是UI上Tensegrity机器人技术的创始人之一,并且获得了数项开发Tensegrity in Robotics的资助。
伊戈尔正在考虑一个主意
德米特里(Dmitry),奥列格(Oleg)和海尼(Haney)收集了第一只腱索(看起来像什么)。德米特里·德维特(Dmitry Devitt)GigaFlopsis-大学的一名研究员和研究生,也是应用最现代技术的人-碳管和凯夫拉线,用碳和软塑料进行3D打印,实现了一切并使其飞起来。

组装乌拉张力的过程

。发生了!
苍蝇!
在飞行史诗影片中,德米特里(Dmitry)也是继张紧龙之后的第一位演员。率:
由两名演员主演的游戏。视频由DeluuusiOn
有关原型构造的更多信息
第一架原型无人机的设计结果如下:
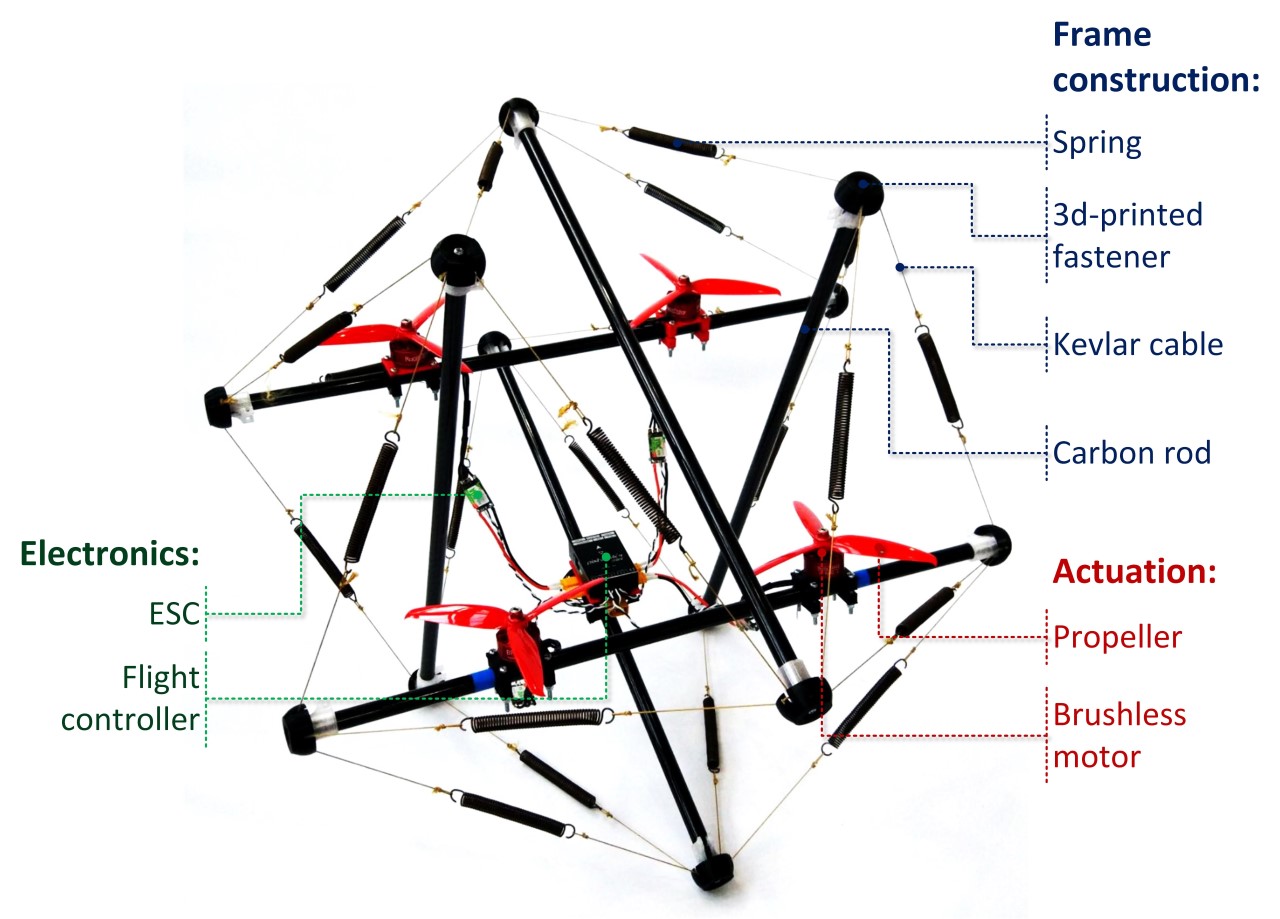
印诺波利斯大学的原型张紧龙的设计使用了
基本的六杆张紧设计。与刚性四轴飞行器不同,我们有两对安装在不同梁上的螺旋桨电动机。而且,它们都没有牢固地连接到位于下横梁上的自动驾驶仪。
无人机原型的机载电子和机电组件包括:
- 自动驾驶仪CUAV Pixhawk v5 mini;
- 3s 1400mAh电池;
- Racerstar REV35 35A BLheliS 3-6S ESC调节器;
- Racerstar Racing Edition BR2205 2300KV电机;
- IMU传感器MPU9250。
电缆由凯夫拉尔纤维制成,带有定制弹簧。杆由碳纤维管制成。端盖和其他小零件均经过3D打印。
管理问题
与传统的硬无人机相比,主要的控制问题是振动,首先是振幅大,其次是控制器和不同的发动机,它们是不同的,因为 它们安装在不同的横梁上(尽管这也可以是一个优点-隔振)。
早期的云台Tensodron测试:振动(对垂直视频感到抱歉)
在飞行中对张张量的早期测试:振动
我们并不孤单
, .
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
( ), , Imperial College London:
, : — .
.. , , , .
, , :
Hayden Cotgrove, Christopher Turner, Zachary Yamaoka Tensegrity Drones.
-, . -, — -, -, . , , .
. , Hayden Cotgrove, Christopher Turner, Zachary Yamaoka:
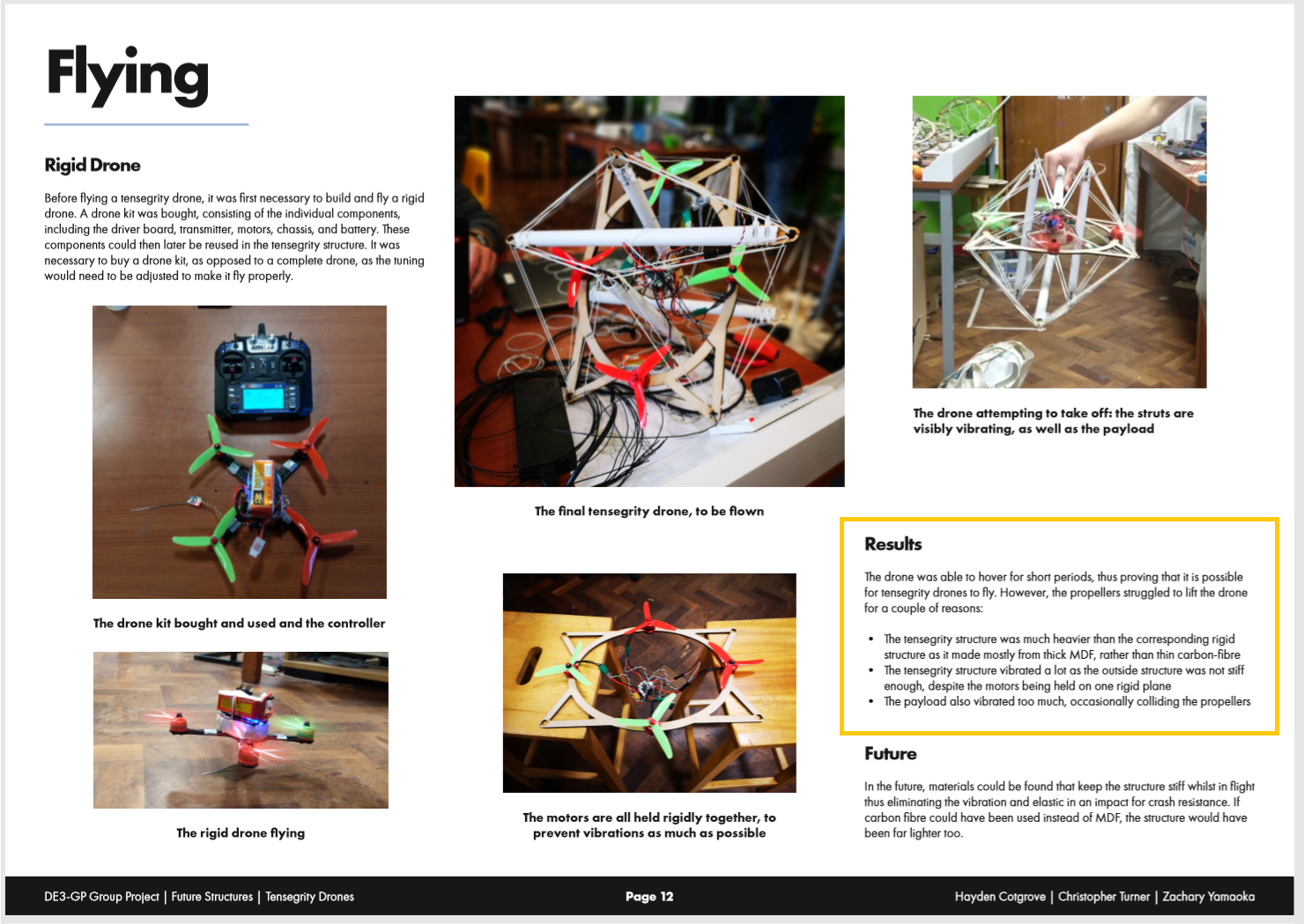
Results
The drone was able to hover for short periods, thus proving that it is possible for tensegrity drones to fly. However, the propellers struggled to lift the drone for a couple of reasons:
- The tensegrity structure was much heavier than the corresponding rigid structure as it made mostly from thick MDF, rather than thin carbon-fibre
- The tensegrity structure vibrated a lot as the outside structure was not stiff enough, despite the motors being held on one rigid plane
- The payload also vibrated too much, occasionally colliding the propellers
我们从两个方面解决了这些问题-通过改进设计以减少飞行过程中的振动并开发控制和状态估计算法以抑制振动和更好地控制,包括考虑来自IMU传感器在横梁上的附加数据以及张力结构的动态模型。
在室内跌落至地面,然后起飞(未安装)
其他一些测试视频
, , . , .. .
( )
( )
下一步是什么?
研究
未来还有很多有趣的事情:
应用
现在,这东西可以自行执行特定的任务(包括街道和室内的GPS-我们将使用视觉测距法)。对我们来说,进一步检查房舍是显而易见的。
除了低级控制和形状外,Tendodron是常规无人机,我们将运动计划算法集成到其中,以实现自主探索和避障。
执行自动检查的示例。Victor Massague的硕士项目,我们的毕业生,不久的将来,他希望是巴塞罗那的一名员工
再研究一次
Tensegrity无人机设计的潜力远远大于简单的无人机。
还记得上面视频中的可折叠无人机吗?什么有关赢钱?
因此,如果您主动更改拉杆的长度或张力无人机的电缆张力,则可以控制其配置(或更简单地说,形状)!
事实证明,可折叠的变形Tensodrone。我们正在这一领域积极进行研究。
Innopolis University可变几何Tensodron(概念)

在飞机上使用Tensegrity提出了新的研究挑战。设计的原型已经表明,这一想法行之有效,并可用于保护无人机。