
进化给了我们许多不寻常的动物。他们中的一些人如此不寻常,以至于他们的发现者被称为骗子(就像1797年的鸭嘴兽一样)。但是不仅动物群可以夸耀非标准物种,而且在植物群的代表中还有白色的乌鸦,即不想坐在阳光下饮食的植物,而是喜欢多汁的昆虫和其他小动物作为今天的菜。早些时候,我们已经熟悉了一项研究,在该研究中,科学家检查了维纳斯捕蝇器及其边缘的荆棘。... 今天,我们必须找出这些刺的敏感程度。来自瑞士苏黎世大学的科学家进行了一系列实际实验,目的是测量维纳斯捕蝇器对特定力接触的反应速度。科学家如何精确地捕捉捕蝇器,其反应速度有多快,这些结果如何解释捕食性植物的美食偏好?我们将在科学家的报告中找到这些问题的答案。走。
研究依据
为了不增加这种叙述,金星捕蝇器的描述(在上一篇文章中已经使用过)隐藏在扰流板下面:
什么是捕蝇器?
, . , . — , . , «» (, ) ( , ). 630 , , .
: . ( ), — , .

. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .

: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
: . ( ), — , .
. , — ( 300 000 1 ) , . , , . , . , .
, «».
, . : , , . , , . , , , . -, . .
: , - .
, -, . . , . , . , . , ? , . 2 20 . , , . , , , , .
. , . , , . , ( ), , . . , , . — , . , . , 2-3 .
. , , . , , . , .
True Facts: Carnivorous Plants ( : ). .
, -. , , .
, , , , « ». , , «». , , , , . , . , .
触发金星捕蝇器诱捕机制的主要思想是,未来的猎物需要在30秒内对植物的敏感毛发进行两次接触。它们的每一次接触都会产生一个动作电位*,以关闭陷阱。科学家们已经相信了200年,但是理论与实践相符吗?
在多年的研究中,科学家推论了捕蝇器狩猎期间理论上应该发生的事件的情景:
- 饥饿的植物通过分泌挥发性化合物吸引昆虫;
- 不是很精明的昆虫探索植物(希望获得免费食物),在此过程中,昆虫接触了六根敏感的毛发之一,从而引起了动作电位(动作电位AP);
- 30 , «It’s a trap!», , ;
- (, ), (C12H18O3) .
结果,捕蝇器先前打开的“花瓣”变成了一种胃,在其中消化不成功的猎物。
在这项工作中,科学家决定详细考虑将敏感头发的机械刺激转换为电信号的过程。我们肯定知道,触摸敏感的头发会打开机械敏感的离子通道,但我们尚未能够识别这些通道。
当这些推定通道打开时,受体电势*(来自受体电势的RP )增加,并且如果头发的挠度足够大,则RP会达到一个阈值,在该阈值以上会出现AP。
* — , .
* — , .
* — .
图片#1
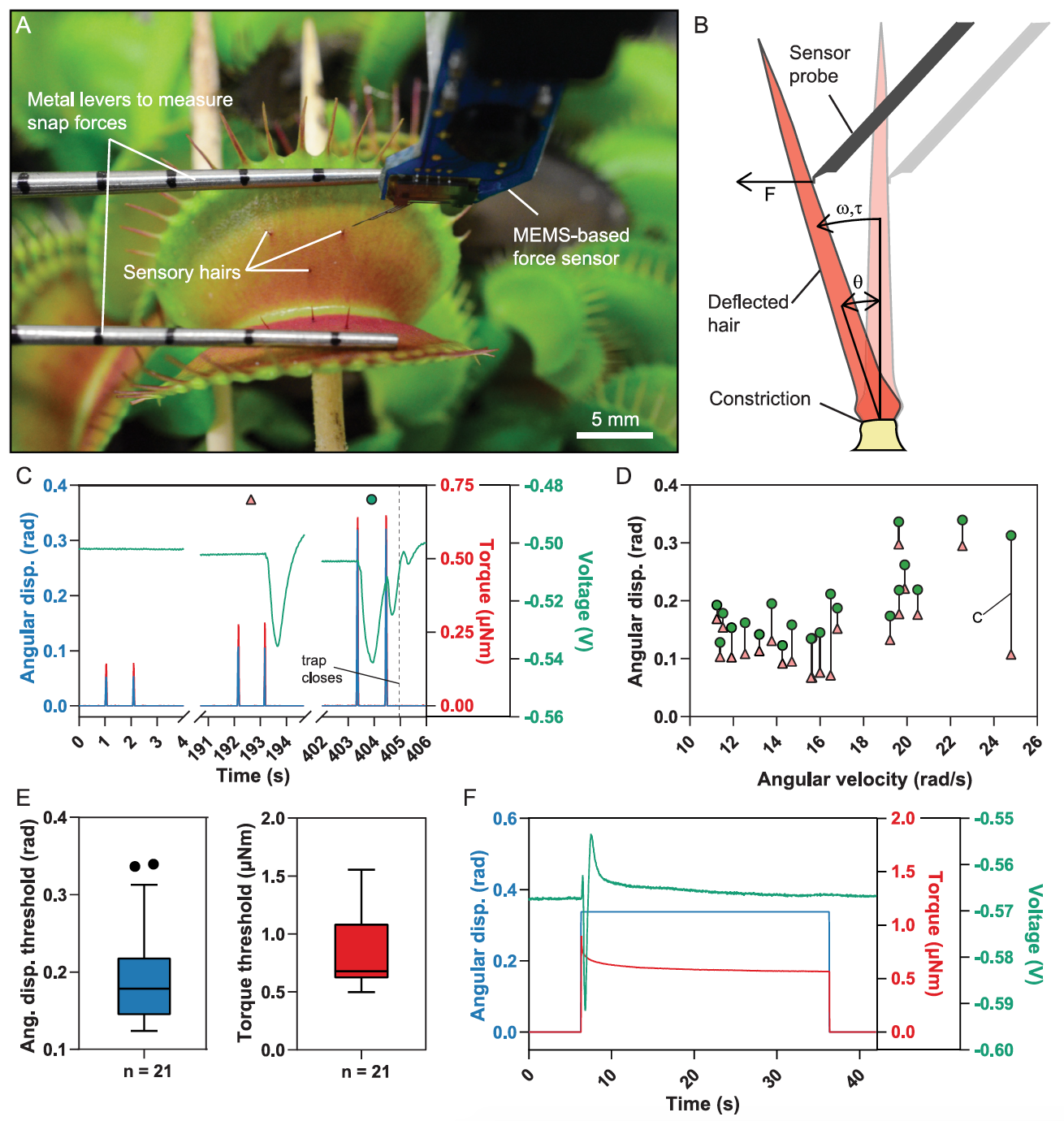
以前,曾尝试将机械刺激与动作电位的产生联系起来,但没有合适的仪器可以进行精确的测量。在我们今天正在审查的研究中,科学家使用了安装在微机器人系统上的基于MEMS *的力传感器来精确控制偏转的速度和幅度,并同时测量所施加的力(1A和1B)。
MEMS *(微机电系统)是结合了微电子和微机械组件的设备。
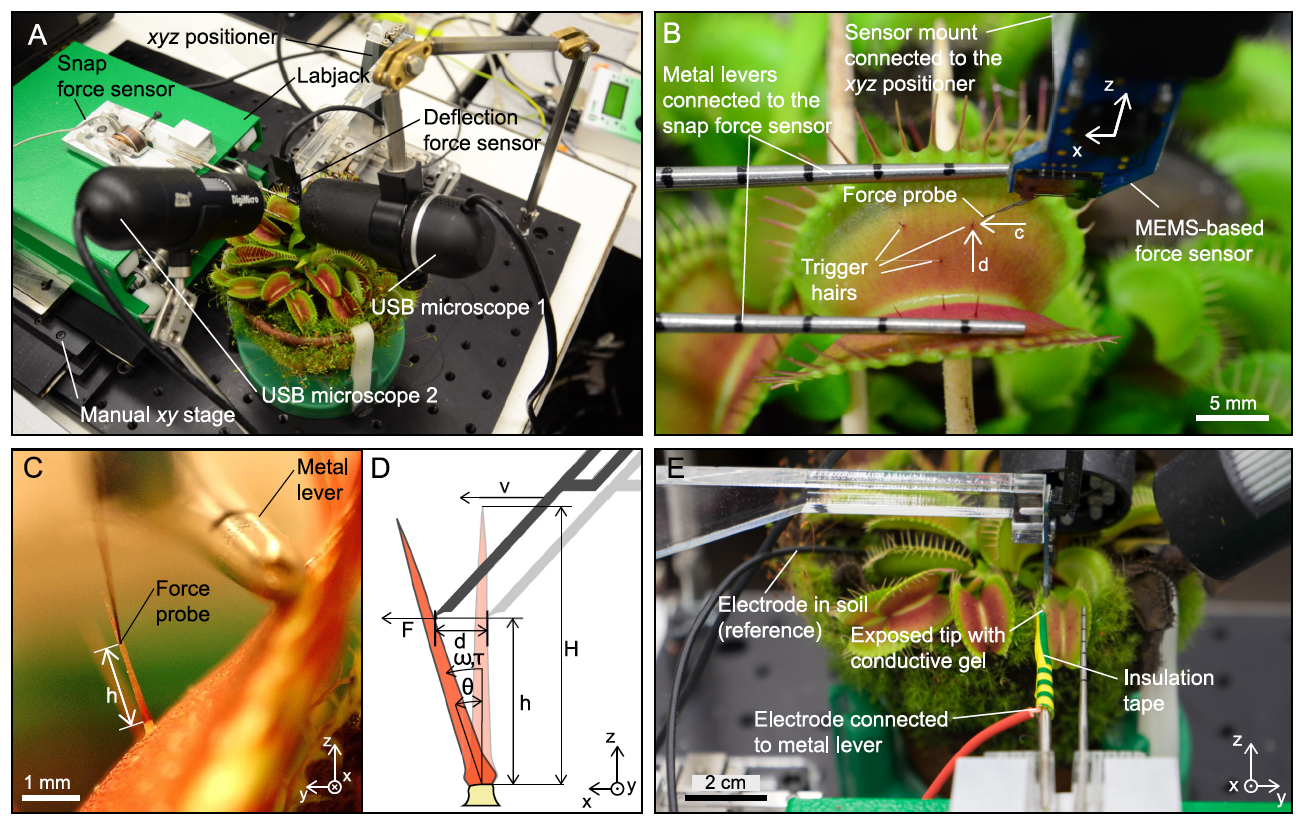
图像#2
通过这种方式,科学家们能够准确地确定参数范围,在该范围内,毛发的偏转会导致陷阱的闭合,而第二个力传感器则测量了所产生的瞬时力(上图)。
研究成果
在实验过程中,科学家考虑到蜘蛛,苍蝇和蚂蚁(捕蝇器的常见猎物)会导致敏感的毛发迅速偏转。因此,微机器人系统被全速部署以模仿这些刺激。这导致10至20 rad / s的高初始角速度。
先前的研究发现,蚂蚁以0.25-7.8 rad / s的角速度偏转敏感的头发,但比苍蝇慢。因此,所使用的参数要高于实际参数,非常适合评估维纳斯捕蝇器的功能。
在如此高的速度下,偏转的持续时间明显短于其他与时间相关的因素,例如RP衰减和感觉毛发松弛(1F)。
考虑到角度偏差而不是线性偏差,可以校正感官探针的接触高度相对于感官头发变窄的位置的差异,以及感官头发的不同几何形状(1B,2C和2D)的差异。因此,可以通过离散增加的角度偏移来近似一个偏移,并且AP触发主要取决于角度偏移的大小。
一种偏转被定义为前后角度位移的组合,类似于猎物接触头发时发生的位移。每次测量都包括两个后续偏转,它们之间的间隔为1 s,直至给定的角位移θ。如果陷阱没有关闭,则等待一个阶段(2分钟)以确保RP被完全重置。等待正好两分钟,而不是更多/更少,是由于以下事实:一系列较早的实验表明,在低于30°C的温度下,需要30–40 s内使头发发生两次偏转才能快速完全关闭收集器。
在等待阶段之后,以增加的角位移重复该过程,直到触发疏水阀关闭机构(1C和1D)。当达到平均位移阈值θ= 0.18 rad或平均扭矩阈值τ= 0.8μNm(n = 21)时,就会发生这种情况。
科学家注意到,如果θ低于0.12 rad和τ低于0.50μN·m(1E),则永远不会记录阱的关闭情况。因此,这些指标是在该实验条件下触发陷阱关闭所需的角度偏差的下限。还可以确定,要使诱捕器起作用,昆虫必须在毛尖附近施加0.5 mN的力(F),在基部附近施加5 mN的力(F)。
美联社的测量提供了感官的头发偏转和陷阱关闭之间的联系。当两个连续的偏差远低于偏差阈值(θ<< 0.12 rad)时,未观察到AP。对于接近位移阈值(θ<0.12 rad)的偏转幅度,在第二次偏转之后检测到单个AP。
这表明两个头发偏斜都导致了RP,并且仅在第二次偏斜时才达到了AP诱导阈值。不出所料,单个AP不足以触发陷阱。
每次触摸触发AP的假设只有在感觉毛发的偏转超过位移阈值时才有效。如果是这样,则会生成两个AP(每个头发偏斜一个),并使陷阱关闭(1C)。
敏感毛发的两次偏转导致两个AP和陷阱闭合。
这些结果表明,敏感毛发的快速偏转将RP增加到一定程度,这取决于角偏转的幅度。 RP可以堆叠并且可以在多次偏转之后召唤AP(如果它们低于偏转阈值)。但是,仅当敏感头发的偏斜度高于偏斜度阈值时,每次触摸才会产生一个AP。
换句话说,仅当敏感头发已被“充分干扰”时,才会产生动作电位。但是单发动作电位不足以触发陷阱的关闭。这与捕蝇器不会在每次有人或有人碰他们的头发时关闭陷阱时浪费能量的理论相吻合。否则,可能有许多没有任何能量(即营养)回报的闲置陷阱(猎物设法逃脱,猎物太小或根本不是猎物,而是垃圾)。
鉴于具有多个偏差的RP的增加是累加的,因此可以合理地假设,持续(长期)置换头发可以产生类似的效果。
为了验证这一假设,科学家拒绝了捕蝇器的敏感头发,使其超过了角位移阈值,并将其锁定在该位置30秒钟(1F)。但是,这并未触发陷阱。
最初的移位导致了一个AP,此后张力迅速恢复到基线,尽管头发仍保持偏转。
如果持续的偏见有助于RP,则必须保持在阈值以上,在这种情况下,预期会出现AP系列。进一步的分析表明,角度错位确实在RP中起着重要作用,但是静态的头发偏斜根本不起作用。
奇怪的是,在较早的实验中情况是不同的:单次移动头发会导致疏水阀关闭。但是,这不是整体的单个位移,而是许多小的位移,因为伴随头发手动偏斜的振荡可能大于角度位移阈值。
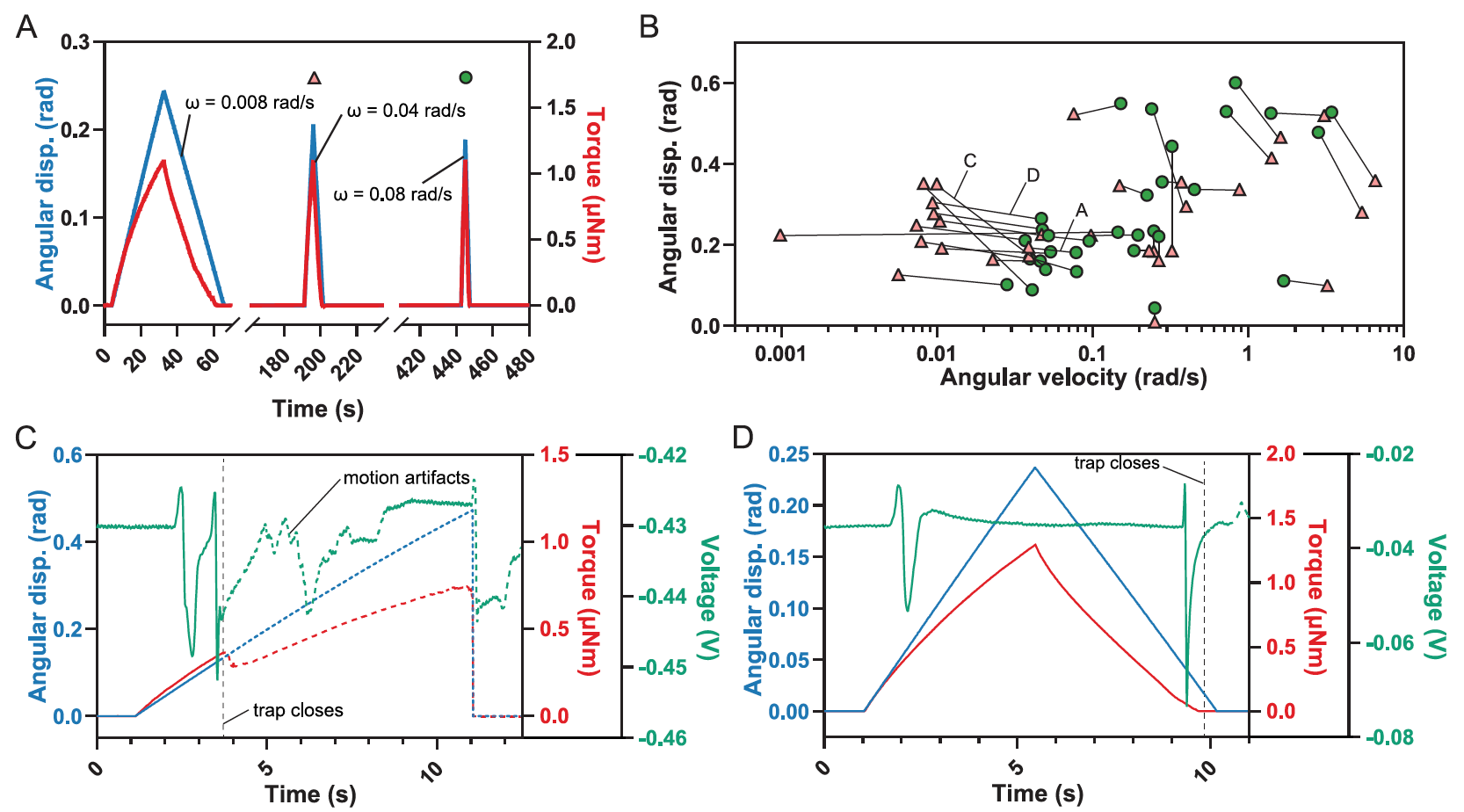
研究的下一个阶段是创建一个机电电荷累积(ECB )模型,该模型出人意料地预测到通过一次触摸即可关闭陷阱。
基于实验中获得的数据,科学家们开发了一个简单的模型来研究陷阱在其中发生反应的角度位移和速度的极限。
在ECB模型中,机械偏转会导致电荷积累RP随角速度ω和位移θ的变化而变化,而电荷会不断耗散。如果累积电荷超过某个阈值Q th RP,则会发生AP。另外,实施了不应期t RP,表示激活另一个AP所需的时间间隔。
结果,该模型预测,如果偏差太快和/或太小,则可能需要两个以上的偏差才能使陷阱关闭(3A处的红色区域)。

图片#3
这是由于以下事实:一次偏转不足以激活AP(3B),如实际实验所示(1C,中心)。
类似地,该模型显示出非常低的角速度(ω<0.04 rad / s)无法填充RP。
但是模拟的最出乎意料的结果是对中间角速度范围(0.04 rad / s <ω<10 rad / s)的预测,在这种情况下,一次偏转足以激活两个或多个AP,这是关闭陷阱所需的(3B)。
但是,这样的预测与金星捕蝇器捕集机制如何工作的想法相矛盾。因此,科学家决定检查这种模型情况是否可以在实践中实现。
敏感毛发的一次偏转会导致陷阱闭合。
出人意料的是,如果角速度足够低的话,陷阱的闭合确实会在单次偏转头发的情况下发生。
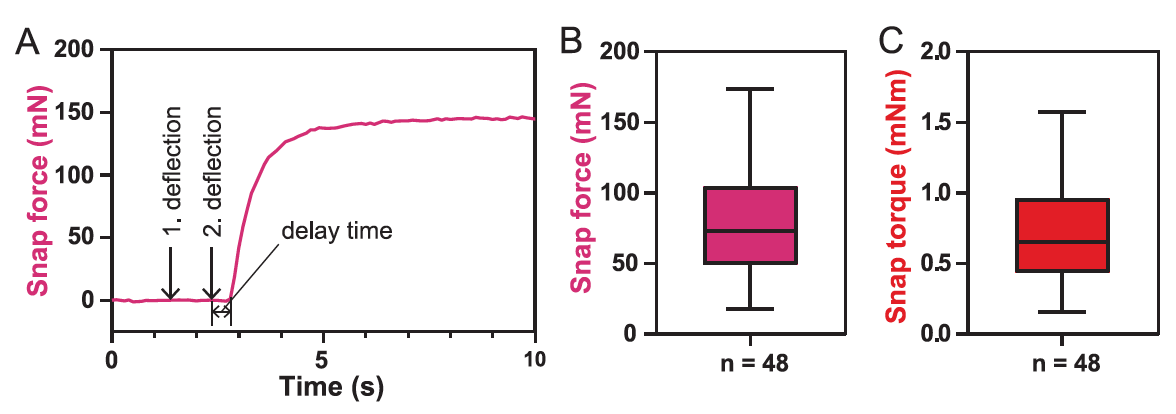
为了缩小发生这种情况的值的范围,科学家们以不同的角速度反复偏转相同的感官毛发,直到陷阱关闭为止。在两个连续的偏转之间有2分钟的间隙,直到陷阱恢复并且RP耗尽为止。
通过在每次偏转之后逐渐增加角速度来确定在一个偏转时关闭捕集阱所需的角速度ω的下限(n = 17)。初始速度低于0.009 rad / s,因为诱捕器从未以该速度关闭。
图像#4
随后以逐渐增加的速度执行单发偏斜,直到触发陷阱(4A)。
上限的确定方法类似,从ω> 3 rad / s的速度开始,然后逐步减小(n = 9)。
此外,还进行了另一组具有一个挠度(n = 5)的实验,其中力探头的速度保持恒定,这导致了0.2至0.4 rad / s的中间角速度,而在此期间角位移θ逐渐增大为了获得陷阱在毛发单次偏转的条件下运行所需的下限θ,需要进行后续偏转的时间。
导致陷阱关闭的所有单个偏斜以及之前没有发生陷阱关闭的刺激,确定了单个偏斜导致关闭的区域(4B)。
单个偏转会导致阱以偏转的中间角速度(0.03 rad / s≤ω≤4 rad / s)关闭。但是仅以较低或较高的速度偏转是不够的。
实验表明,当传感器接近头发的根部以及当传感器移离头发的根部时,陷阱都被触发。
敏感毛发的一次偏转会在初始弯曲过程中导致两个AP,从而导致陷阱闭合。
当在探头接近过程中关闭阱时,在头发偏转期间观察到两个连续的动作电位(4C)。当在移除探针期间关闭阱时,在头发偏斜的时刻出现一个AP,而在移除探针之后的第二个AP出现在头发返回其原始位置(4D)时。在这两种情况下,第二个AR导致陷阱立即关闭。
总之,科学家们决定测量疏水阀(5A)的关闭力。
第5张图片
对于48个疏水阀,抓持力F close的平均值为73 mN(5V),并且值的范围从18到174 mN。
这些值低于以前发布的值(140-150 mN)。对此有一个解释:在这种情况下,该力是在诱集器关闭开始时测量的,而在先前的观察中,已测量了在关闭完成时作用于诱集器小叶边缘的力。
由于测得的力在很大程度上取决于换能器的位置以及纸张的方向和尺寸,因此以0.65 mN m的平均值在纸张中间附近闭合的闭合扭矩τ是描述捕集阱闭合力(5C)的最佳值。延迟时间,即机械刺激与疏水阀关闭开始之间的时间为0.6±0.3 s。
要更详细地了解这项研究的细微差别,建议您查看科学家报告。
结语
维纳斯捕蝇器不像猎豹那样运转,不像眼镜蛇一样具有致命的毒药,当然也不会像猫头鹰一样听到猎物的声音。但是这种植物确实是地球上最好的食肉动物之一,因为它的狩猎机制就像钟一样。
在这项工作中,科学家们能够确定这些参数或这些参数对于陷阱起作用应该是什么。事实证明,在大多数情况下,要触发陷阱,受害者必须犯下两个连续的错误:第一,触摸捕蝇器的感官头发;第二,触碰陷阱。第二是再做一次。
头发从其初始位置的反复偏移导致第二动作电位的产生,第二动作电位开始关闭诱捕器的过程。但是,建模表明,在某些条件下,一按可能就足够了,但实际上这极不可能。
换句话说,维纳斯捕蝇器可以用作捕蚊器吗?不,因为这些吸血鬼很小而且太灵活了。但是捕蝇器并不后悔苍蝇或蜗牛。
谢谢您的关注,请保持好奇,祝您周末愉快!:)
一点广告
感谢您与我们在一起。你喜欢我们的文章吗?想看更多有趣的内容吗?通过下订单或向朋友推荐,为开发人员提供云VPS,最低价格为4.99美元,这是我们为您发明的入门级服务器 的独特类似物:关于VPS(KVM)E5-2697 v3(6核)的全部真相10GB DDR4 480GB SSD 1Gbps从$ 19还是如何正确划分服务器?(RAID1和RAID10可用的选件,最多24个内核和最多40GB DDR4)。
阿姆斯特丹的Equinix Tier IV数据中心的Dell R730xd 2x是否便宜?仅在荷兰有2台Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100电视!戴尔R420-2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB-$ 99起!阅读有关如何构建bldg的基础结构的信息。戴尔R730xd E5-2650 v4服务器上的价格为9000欧元的价格?