
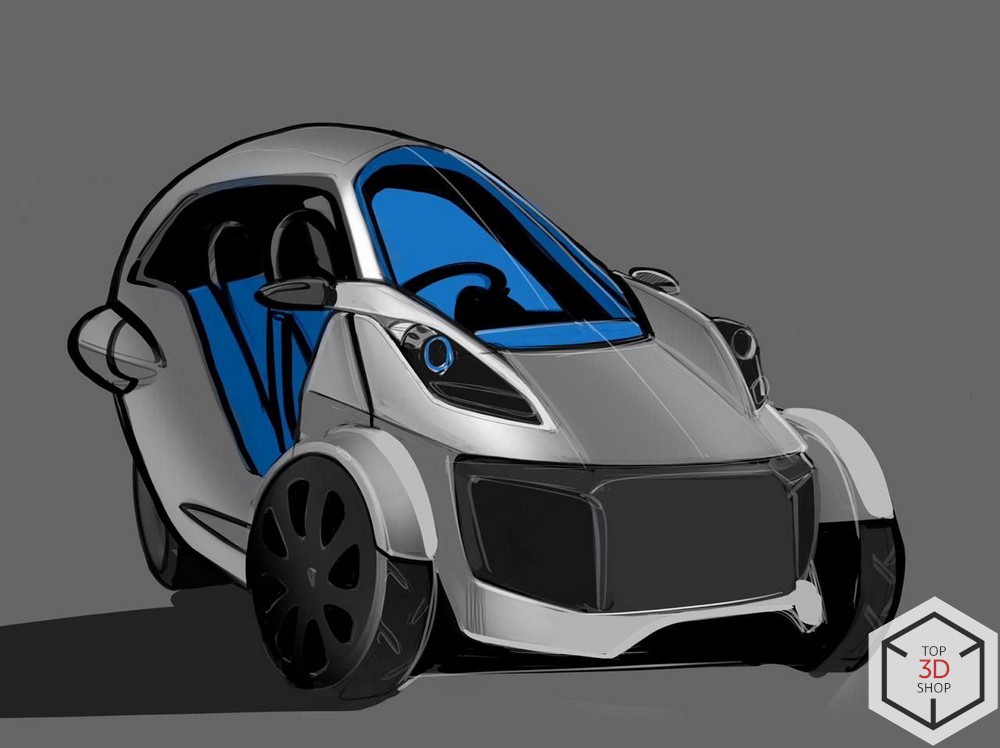
我们正在谈论的是我们为电动汽车开发商EVTech进行的电动汽车3D扫描。进行了扫描以纠正汽车的设计,对布局进行更改以改善其-车身零件,引擎盖和翼子板的现代化,以及随后通过旋转成型和自动真空成型制造新零件的过程。使用Rangevision Pro专业3D扫描仪进行扫描
从本文中了解更多信息。
任务

电动汽车开发公司EV-Tech的员工与我们联系。挑战是扫描微型电动汽车。这是一个庞大的项目,需要按时完成。进行扫描以改进汽车的车身和内部结构-简化单个单元和零件的最先进技术和最方便的相对位置的实现,然后根据需要更改设计。
处理

- 准备汽车进行扫描;
- 使用Rangevision Pro摄影测量扫描仪进行车辆扫描,从该模型的先前版本称为Rangevision Pro 5M;
- 信息处理,粘贴数字模型。
技术细节

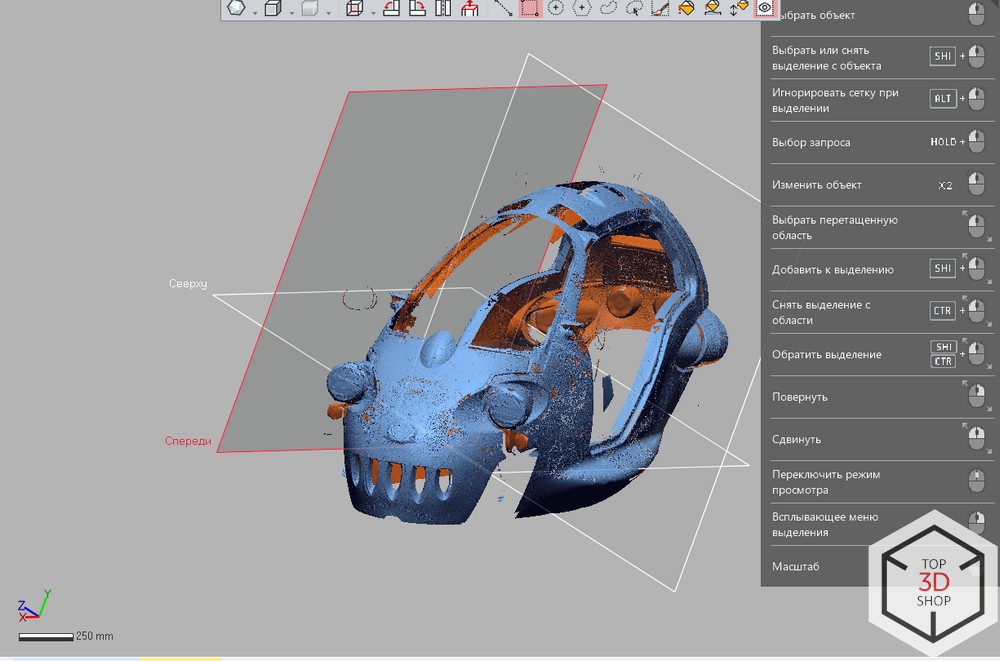
在扫描之前,将车辆放置在服务部门处所。准备过程耗时半小时,眩光表面被粘上了胶水,因为眩光会干扰3D扫描-反射光,使其不进入相机,从而导致扫描中出现“孔”。下图中的示例。

将标记粘贴在一起以创建坐标网格,以帮助扫描仪计算点的坐标,并安装了设备和校准字段,以在移动扫描仪时快速阐明校准。
标记以随机顺序放置,以便它们的相对位置不会重复,以避免在从单独的框架粘贴扫描图像时避免重叠,因此扫描仪可以更准确地确定被扫描表面的形状。
扫描本身花费了很长时间,然后我们将考虑扫描的阶段。
关键阶段
1.获得基本几何形状

图1.1汽车的侧面。

图1.2汽车的侧面。
首先,拍摄汽车侧面的照片(图1)。
此表面被选作第一次扫描是最大的-该区域的初始扫描有助于识别一些在出现时已纠正的问题。关于问题及其解决方案-进一步。
其中一个问题是项目中包含的文件太大。顶级3D集团服务部门的工程师Alexey Vorozhbit说:
“问题在于,配备英特尔酷睿i7处理器和Geforce GTX 960M显卡的笔记本电脑不允许连接和保存超过1.5亿点的项目。这是通过使用自动简化功能解决的,该功能包含在Rangevision Scancenter软件的项目创建菜单中。在此程序中执行了扫描和自动缝合表面的工作。”
考虑到这一点,在将来的项目中将使用图像的自动简化来加快处理点云的过程。图2显示了由第一张图像获得的部分几何图形。图3显示了带有汽车后部,大灯和牌照的点云。

图2.侧面的点云。

图3.握住背部后获得的表面。
此外,通过移动扫描仪,捕获了鼻子部分的几何形状(图4)。

图4.
然后必须扫描前灯,下门槛,车门缝等-无需使用千斤顶或维修坑就可以清除的所有物品。结果显示在图5,6和7中。图7显示了通过“粘合”获得的模型-将所有片段扫描合并为一个模型。

图5.

图6.

图7.
2.处理点云并获取模型

图8.从扫描仪加载的13个stl文件。
由于扫描结果很大,包含约5亿个点,因此我不得不将其部分保存-扫描程序无法完全卸载此类数据包。为了解决此问题,我们将扫描分为13个部分,随后又合并为一个网格。
建立网格后,执行翻转操作,由于汽车是对称的,因此我们可以获取几何的缺失部分。
最困难的步骤是消除扫描缺陷。
问题
在上面的图片中,您可以看到许多小的未扫描区域,看起来像模型中的孔。由于冻结和软件崩溃而获得此结果,这是由于相机通过其连接到笔记本电脑的USB集线器所致。
决断
为避免此缺陷,应直接连接到具有大量RAM(24 GB起)的计算机。扫描仪随附了带有专有软件的微型PC,可在扫描小物体时使用。为了舒适地处理大型物体,您需要一台功能更强大的计算机。
在这种情况下,我们通过重新扫描和进一步粘合解决了这种情况。
当扫描大型物体(沿任何轴距离超过一米)时,服务部门建议使用手持式扫描仪,因为它们更符合人体工程学,可以根据使用原理进行扫描。我们选择RangeVision是因为它具有很高的精度,事实证明该精度对于身体部位是多余的,对于扫描机械零件而言是必需的。
完成时间

三维模型非常精确,与原始模型的偏差公差不超过0.2毫米。考虑到连接和操作的建议,

Rangevision Pro已证明自己是一款高质量的专业扫描仪,我们可以推荐其用于各个领域的工程应用,包括开发汽车,机动车辆,小船和小船的车身零件,以及进行调试和维修。从Top 3D Shop

购买Rangevision Pro,并获得官方保证的原始专业设备。