大约一年前,在已经开发的字符串模型的基础上,为教育和演示目的紧急进行了少量工作。和往常一样,在闲置了一段时间后,她最近引起了我的注意。
告诉Scilab是什么没有意义-读者知道如何使用Internet。

对于已经熟悉Scilab的读者来说,这项工作可能是该工具的一个相当平凡的应用程序,它很有趣。这是指使用示波器对系统进行建模和结果动画显示的“有限元”方法。当然,有些工具是专门为机械师而“锐化”的,但是,我重复一遍,目标是紧急测试Scilab。
对于那些以前不熟悉这个简单而直观的工具的人,知道这一点将很有趣。从安装免费的Xcos到创建以下文本的整个过程,掌握了这种以前不熟悉的软件(可视化编程)的整个过程花了我五天的时间。第二天终于有了一个具有一个自由度的系统的简单模型。我认为,对于您来说,如果需要,在此软件环境中进行研究的事情不会变得更糟,所以继续努力。
文本本身可能太简洁了,因为它最初并不是为广大读者准备的。但是,如果读者有任何疑问,我将尽力记住细节并回答这些问题。所以。
在详细讨论的机械系统(“在粘性介质振动弦”)这篇文章,表示如下:
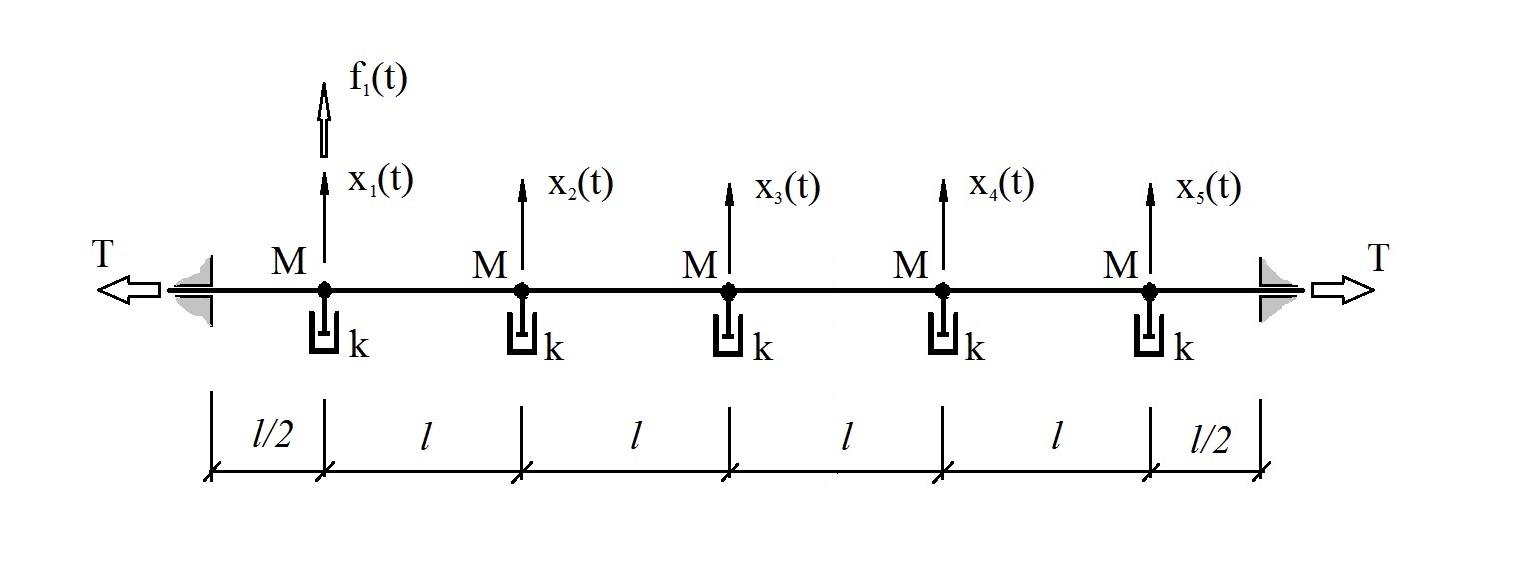
其中,Δt= 0.01秒,L =1μm时,M =1公斤,K = 10千克/秒,T = 2000H
为了简化建模和为了扩展修改模型的可能性,将模型分解为

被建模为子系统(“超级块”)的元素。
在可视编程系统Xcos中构建了以下“关系图”(模型)
“关系图”(模型)使您可以在施加到1号节点(元素)的单个脉冲的影响下模拟系统的行为,注册并以图形方式显示1号节点上的外部影响以及1、2、3、3、4、3节点上系统的响应(位移)。并以动画条件图像的形式直观地显示系统的行为。
“关系图”中包含的五个“超级块”(子系统)分别代表以下内容

该模块从主系统接收有关外部影响,共轭元素的长度和位移,时钟时间,时间采样间隔的值以及琴弦张力的数据。设置中的块包含有关其长度,质量和阻尼系数的数据,可以出于仿真目的对其进行更改。 (显然,由于软件故障,Xcos开发人员未声明隐藏块的可能性。)
该块通过有限差分方法集成了相应的线性ODE。零初始集成条件是使用Xcos系统默认值实现的。
该块将有关其运动(以系统时钟时间为单位)和长度(恒定)的数据传输到主系统。
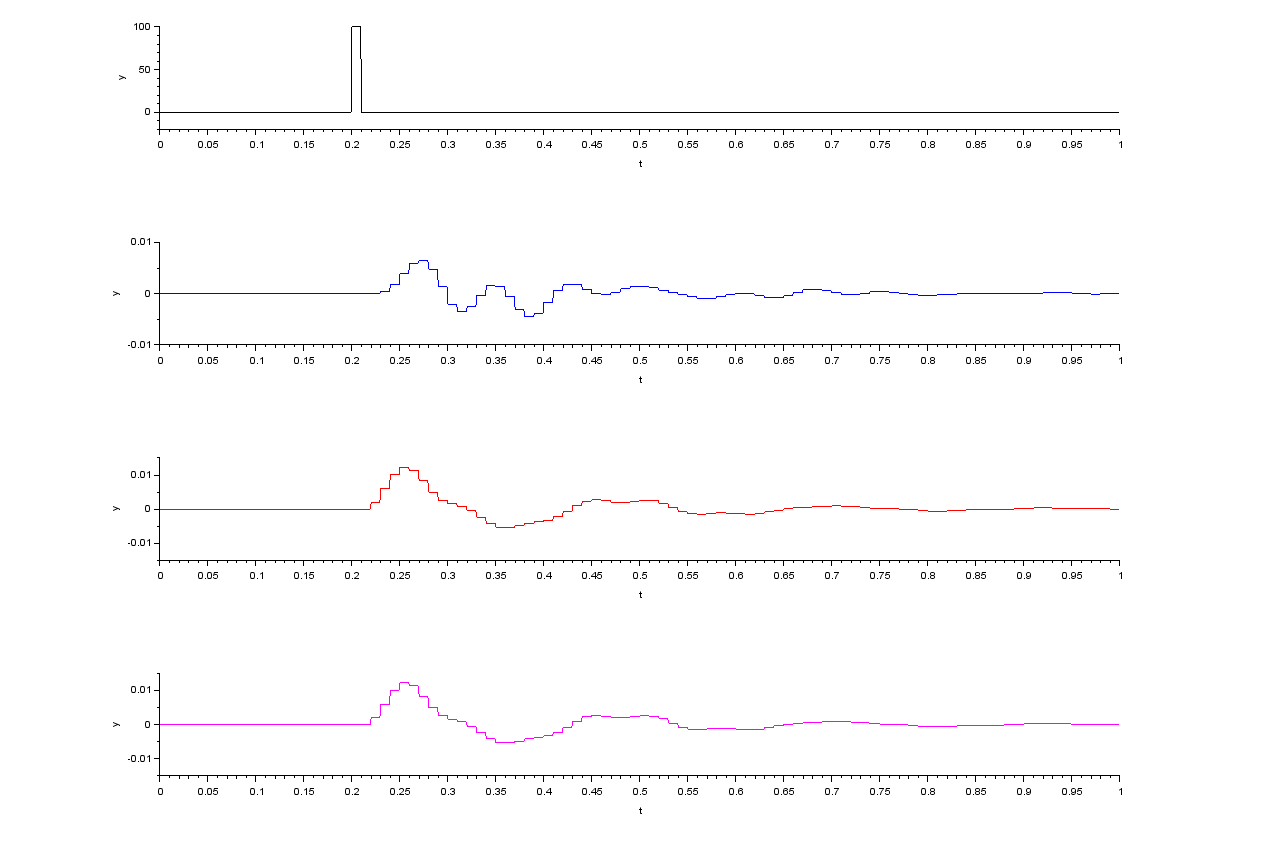
获得了以下模拟建模结果。

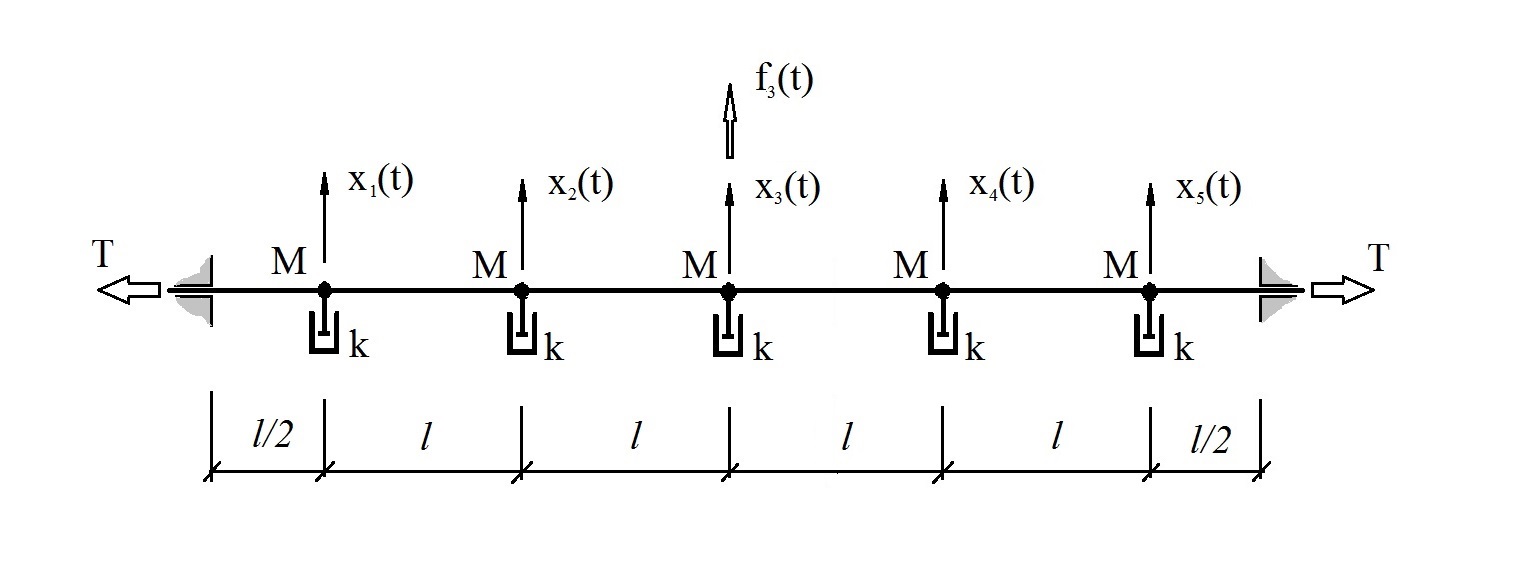
此外,为了更完整地揭示系统的共振特性,与前一个模拟相似地进行了模拟,并在弦的中部(节点编号3)施加了外部影响。

获得了以下模拟建模结果:仅

此而已。祝大家学习Scilab好运。