
(Betaflight 4.1,我还没有在新设置上拍摄过它)
上一篇文章- 从地面到FPV直升机:简介
前几天,我决定升级到Betaflight 4.2,我周围的每个人都建议使用双向DShot进行过滤。顺便说一句,它是在4.1。
首先,让我们稍微了解一下什么是过滤以及为什么需要过滤。
默认情况下,Betaflight提供适用于大多数型号的常规过滤设置。但是要获得最佳性能,可以对过滤进行不同的调整,因为它可能会过大或不足以打击无人驾驶的无人机。
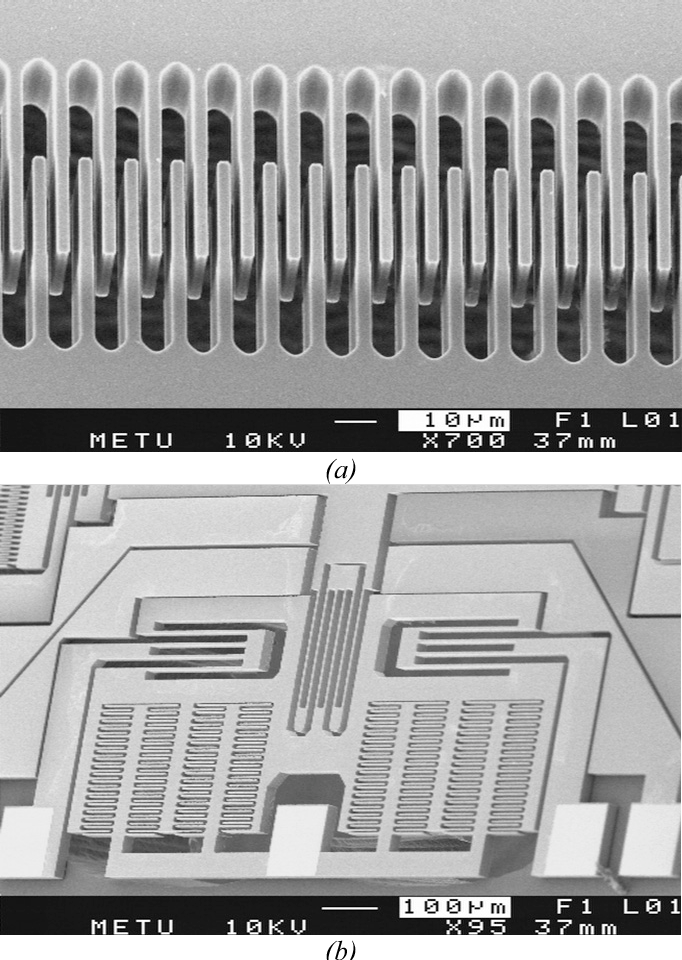
MEMS陀螺仪
每个四轴飞行器都有一个FC-飞行控制器,它实质上是一个大脑。这些控制器还具有一个数字芯片,通常称为陀螺仪-陀螺仪。它是一种感应运动的传感器。它包含一个称为MEMS(微电子机械系统)的小型机电设备。
该设备内部有机械共振的“插头”。这些插头位于所有三个轴(俯仰,横摇,横摆)上,运动(机械部分)会引起电压波动(电气部分)。
电压波动(波动)实际上是模拟波,它们被转换成数字信息以供飞行控制器处理。当我们说8k陀螺仪时,意味着每秒8000次,模拟信号被转换为数字信号,并由控制器,固件(在本例中为Betaflight)进行处理。
噪声
噪音是我们经常听到的一个名词,但这是什么?通常,我们会立即想到下一个23层高的蚁丘中的声音噪声或嘈杂的环境。
陀螺仪和PID控制器面临类似的问题。由于陀螺仪位于安装在框架上的飞行控制器上,因此会产生噪音。噪声可能来自:电动机,螺旋桨,风速,总体框架噪声,电子设备等。
PID控制器
PID控制器是一种系统,可以根据操纵杆(您的控制)或给定位置(好了,不管怎样)来调整四轴飞行器的位置。 PID由3个参数P,I和D调整。不幸的是,在本文中,我们将不详细考虑PID调整。如果您是飞行员,那么您已经知道了;如果您是初学者,将有单独的文章介绍此主题。
当噪声量最小时,该系统可以很好地工作,否则我们可能会面临诸如振动(振动)或电机过热的问题。
PID控制器中的d项尤其与噪声有关。D可以平滑快速运动,但是在PID控制器中计算D会大大增加信号中的噪声。这意味着陀螺仪的噪声被D项值显着放大,因此我们在两个位置进行滤波-陀螺仪和D。
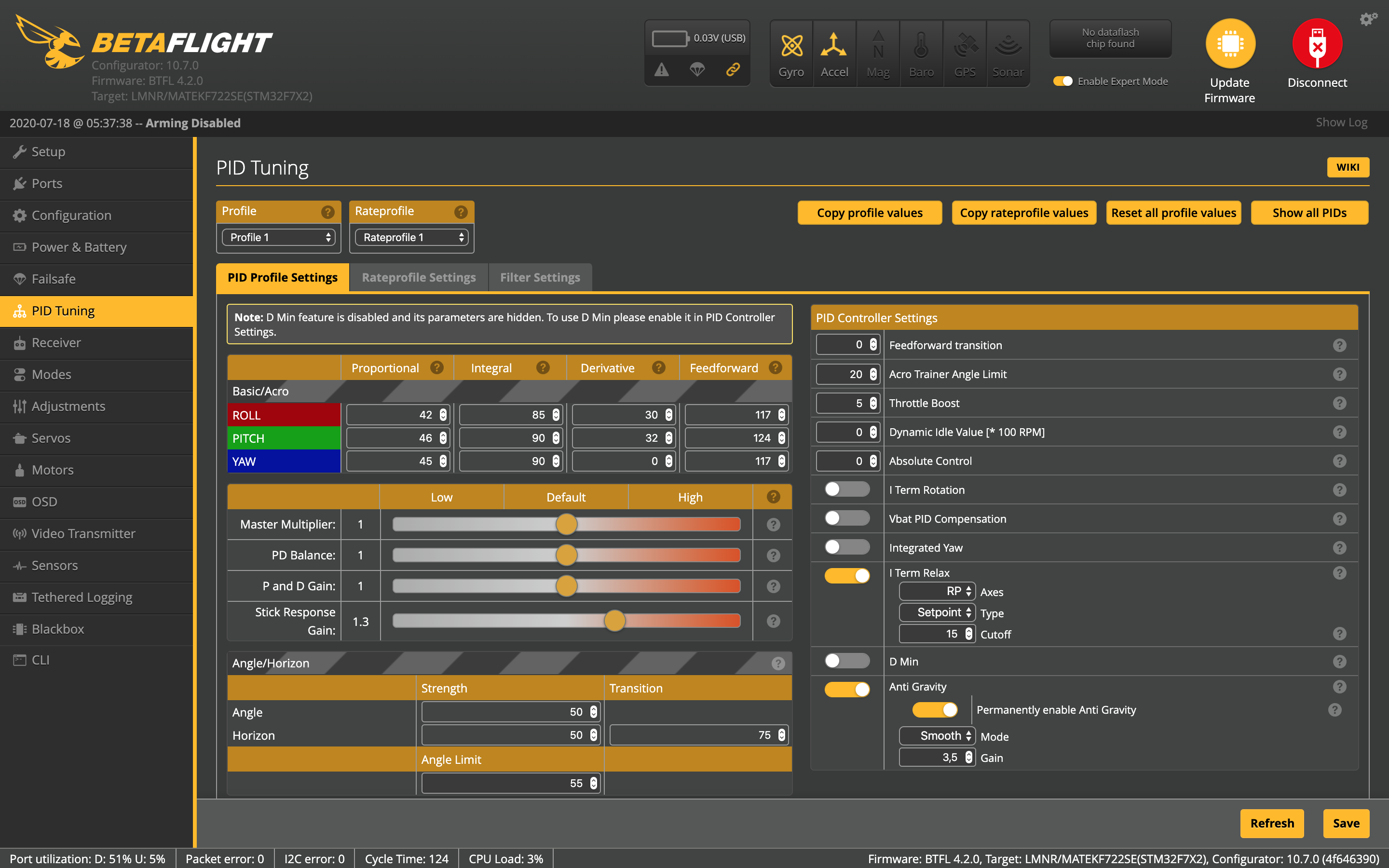
作为这种增加的示例,我将向您显示以下日志:
第一个图-陀螺仪
第二个图-PID
第三个-电动机
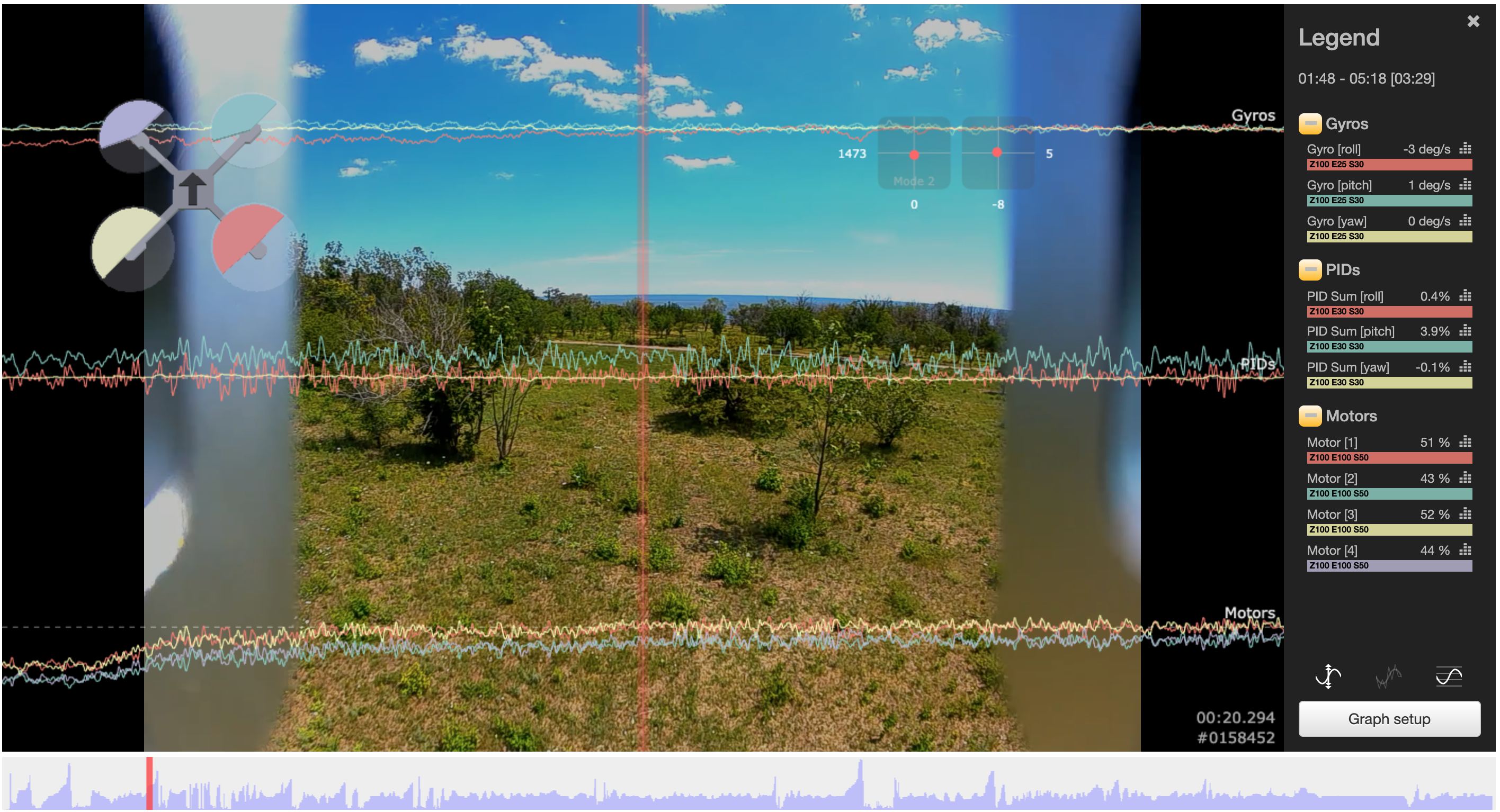
(这些是常规螺旋桨) ,过滤效果略有降低)
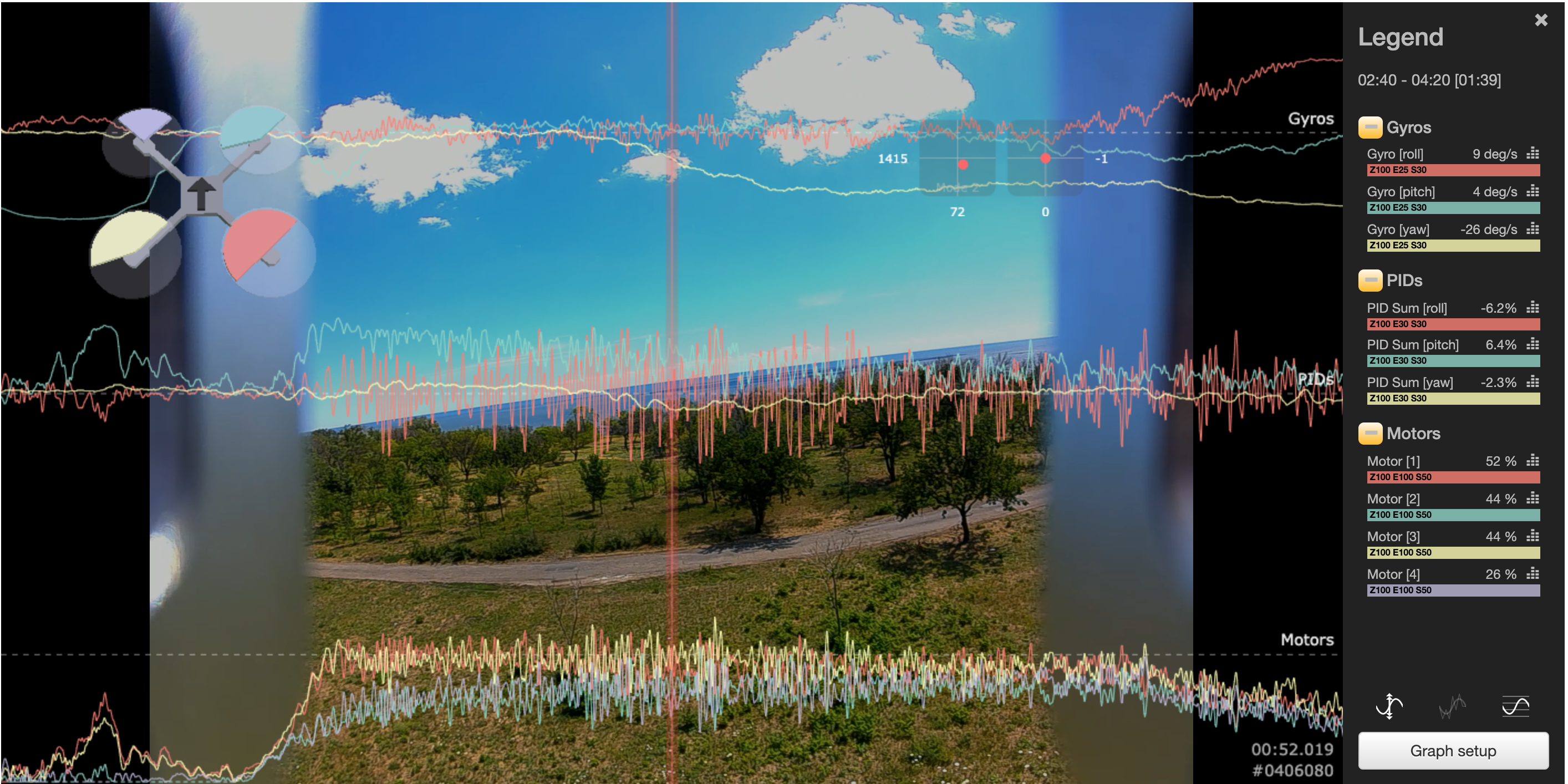
(如您所见,错误的螺旋桨的振动会在PID控制器级得到放大,这会导致电动机承受太大的压力,它们实际上就是香肠)-Blackbox Explorer的
屏幕截图。
过滤
滤波过程是从陀螺仪信号中去除多余的噪声。但是,我们要保留来自陀螺仪的多少信号,以及要滤除多少信号?
老实说,我不能用颜色告诉您,但是碰巧在beta飞行中,噪音或振动是以Hz为单位测量的。1Hz-每秒旋转一圈。这样做是为了便于可视化并使用这些变量。同样,湍流在技术上被称为“旋转变化率”-旋转频率。
四旋翼飞行器的速度在0-30 Hz范围内。在30Hz至80Hz以上时,当四轴飞行器因其自身气流中的湍流而晃动时,我们将进行一次预洗。对于PID控制器,0-80Hz范围内的信息很重要,因此我们不会碰它。
使用PIDtoolbox 您可以绘制以下卡片:

低通
滤波器

如上图所示-陀螺仪的信号包含从0 Hz到1000 Hz的信息,但是我们仅对0-80 Hz范围感兴趣,因为这是PID控制器应该知道的四轴飞行器的实际运动。因此,我们需要一种滤波解决方案,以允许低频信号通过PID控制器同时衰减高频信号,为此,我们可以使用低通滤波器。
低通滤波器允许低频信号通过并衰减高频信号,而高频信号只是噪声。
设置了截止频率,控制器仅将信号降低到该频率以上。衰减曲线使您无法在干净的环境中切割所有东西,并且噪声的频率越高,其衰减发生得越平滑。
飞行员经常会犯这样的错误,即将这种滤波器设置为与可见噪声相同的频率。例如200Hz。由于滤波器可以平稳地衰减噪声,因此安装这种滤波器不会有太大效果。滤波器应设置为较低的频率。也许甚至在80Hz。
安装此类过滤器的次数越少,过滤越多。
设置过滤时,要记住一件事。过滤越多,延迟越大。显然,它以毫秒为单位,并不重要,但是对于PID控制器而言,这很关键。由于它将在以后开始对事件做出反应,这意味着它将尝试对齐过去的四轴飞行器:)
陷波滤波器
陷波转换为一个陷波,实际上看起来像这样:
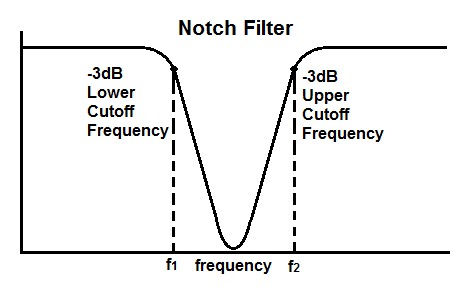
滤波器会丢弃下面的一些噪声和上面的一些噪声。从Betaflight 3.1开始,这些滤波器是动态的,并可以调整为不同的噪声水平。
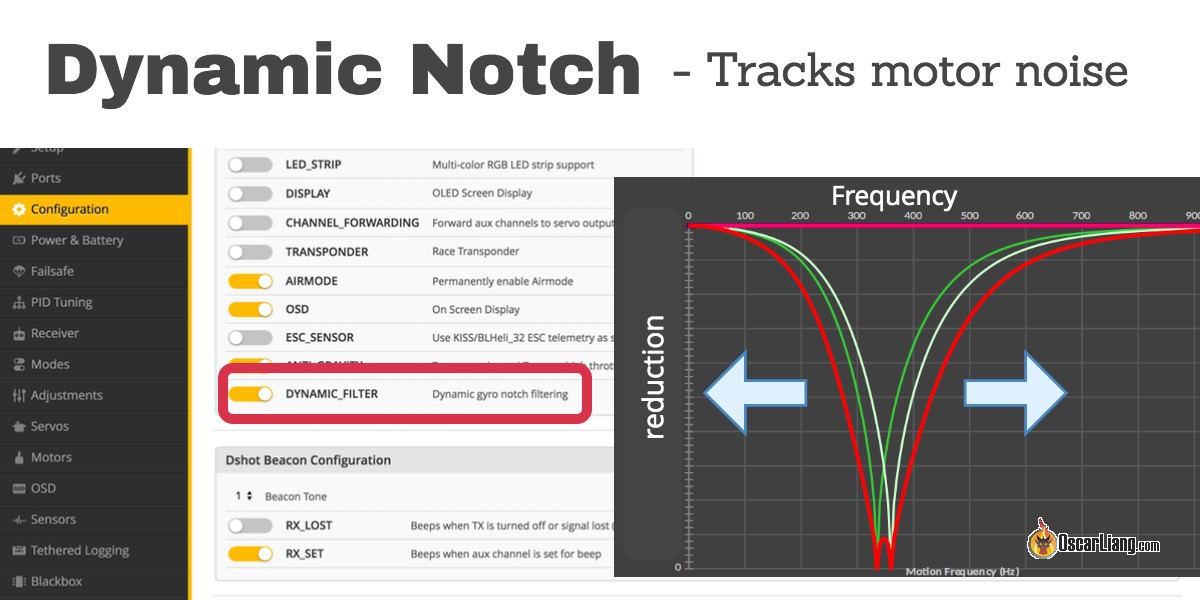
滤波器与低通滤波器结合使用,但是它们已经用于过滤来自上方电机的噪声。
D项过滤
如前所述,D能够将陀螺仪产生的噪声相乘,因此Betaflight具有D滤波功能。
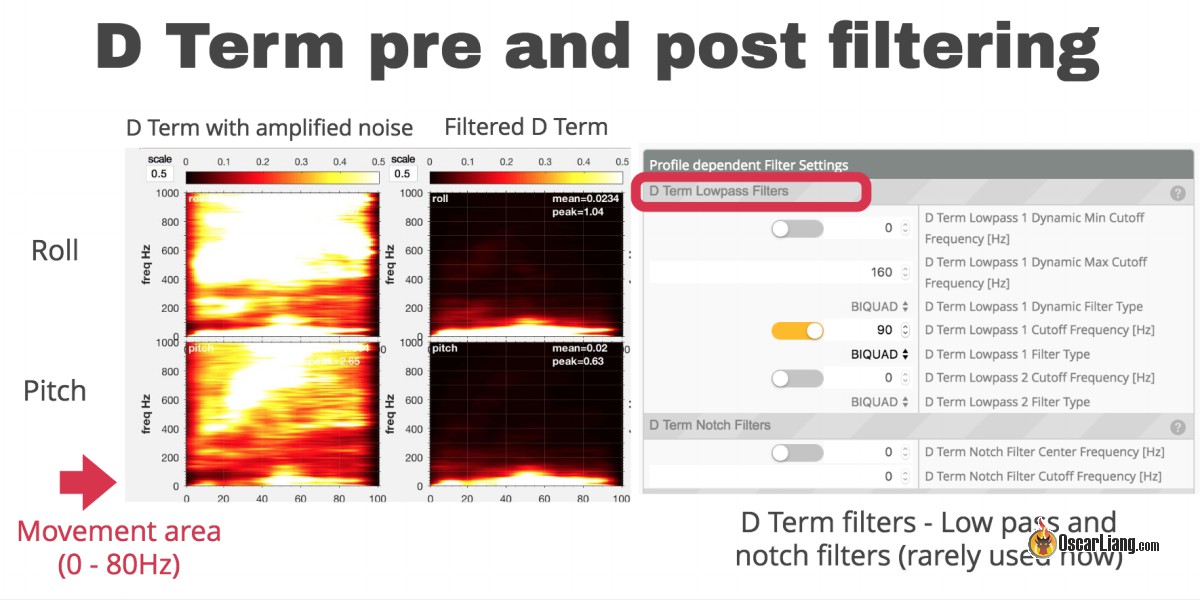
社区中没有明确了解是否对D进行大量过滤。但是有一个热马达的规则,过滤越少,D越高,它们加热的可能性就越大,甚至可能烧坏。但是在相反的方向上,我们会有所延迟。
RPM过滤器
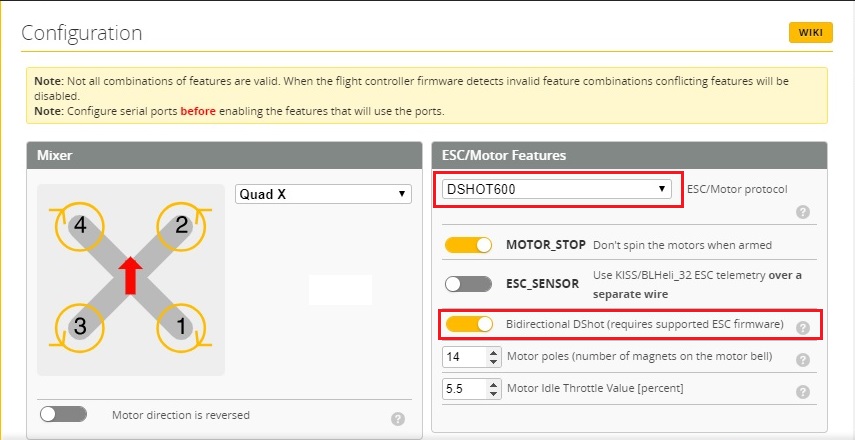
因此,实际上,我开始使用new的是RPM过滤。它通过双向DSHOT协议工作,该协议允许飞行控制器知道特定电动机的确切RPM。然后根据此数据进行过滤。
(您的ESC必须支持双面DHSOT)
3.7版的ESC固件。
如果电动机很热,则这是一个问题。电机过热可能表明电机噪音越来越大,并试图对振动做出反应,以至于产生热量。
电动机会变暖的原因有很多,例如旧框架,电动机上的铃铛弯曲,平衡不平衡,无人机上有多余的炸弹。
当然,最好像他们所说的那样,进行干净的构建,并且一切都会是新的,但是您可以首先尝试设置过滤。
首先,您可以以20 Hz为步长增加滤波D。在每个这样的步骤之后检查温度,并找到最佳范围。
并且您应该在电动机温度和振动之间寻找它。如上所述,尽管过滤是为了减少噪声而设计的,但它可能会产生一些延迟,并且PID控制器可能无法跟上。不管它有多有趣,都会引起振动。但是这些振动不属于预洗。这只是低效的PID运算。
最新版本的Betaflight具有滑块,请尝试不要更改过滤器本身的值,而是尝试使用这些``主''滑块。
目前,我启用了RPM过滤器,并进行了此类设置,也许我会尝试进一步减少过滤器:
