
我们正在开发一种用于收集高尔夫球的机器人。我们需要一个伺服器来打开落球舱口。我们已经测试了大量的产品,今天我们想告诉您一个非常有趣的模拟Dynamixel,它的价格超过一半。
今天,现代型号的伺服驱动器在一个外壳中代表了完整的设备(带有变速箱和控制板的电动机)。控制模型伺服的最常见方法是PWM协议,伺服电机的位置由脉冲宽度确定,脉冲的存在会作为接通信号。这种方法可以使您尽可能简化电子设备,但这并非没有问题。
首先,没有反馈,并且连接到具有类似平台的PC也存在问题(通常需要Arduino或其他微控制器作为中间层)。其次,由于协议的特殊性,每个伺服范围(270或180度)的定位精度很少会超过1 \ 256。第三,无法检测到机械故障和过热。所有这些问题导致这样的事实,即这种伺服器不能用于需要始终如一地高精度控制大量度的任务中。
要解决这些问题,您需要使用公共数据总线。流行的完整解决方案是著名的Dynamixel伺服电机。该协议与常规uart兼容(需要简单的协商方案)。可以使用此端口将其连接到任何计算机(Arduino,Raspberry,pc)。这种方法使您可以同步伺服驱动器的运动,接收反馈,监视性能(错误,温度)以及调整PID控制器。接线也得到了简化,现在可以串联组装伺服器了。制造商针对每种口味和颜色提供多种型号。但是,价格仍然远远高于传统的PWM伺服驱动器。
然后我们得到了国产Ilyusha的伺服驱动器完全符合Dynamixel协议v1。我们想知道那是什么野兽,它能做什么。我们决定对其进行测试,然后我们将介绍其中的内容。
基本参数
电源电压6-15V
最大扭矩60kg * cm
编码器分辨率16384鹦鹉360度
防止过热
电流保护
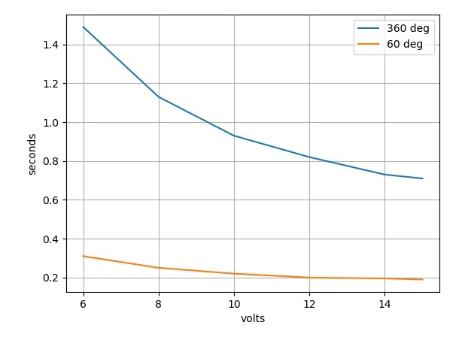
首先,我们将测量在6、10、12、14、15
V 电压范围内的空载转速,
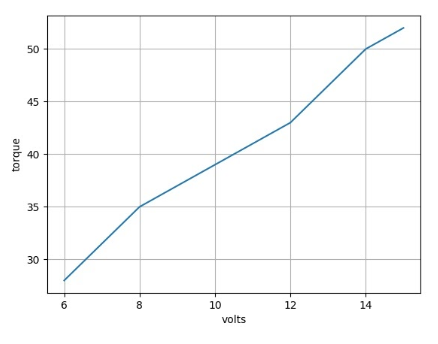
现在我们将测量最大在相同电压值下的力矩:
60度运动的过渡时间。
现在最不愉快的是变速箱中的间隙。
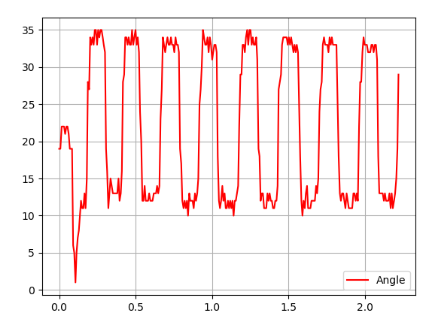
由此我们可以得出结论,齿隙约为0.5度:

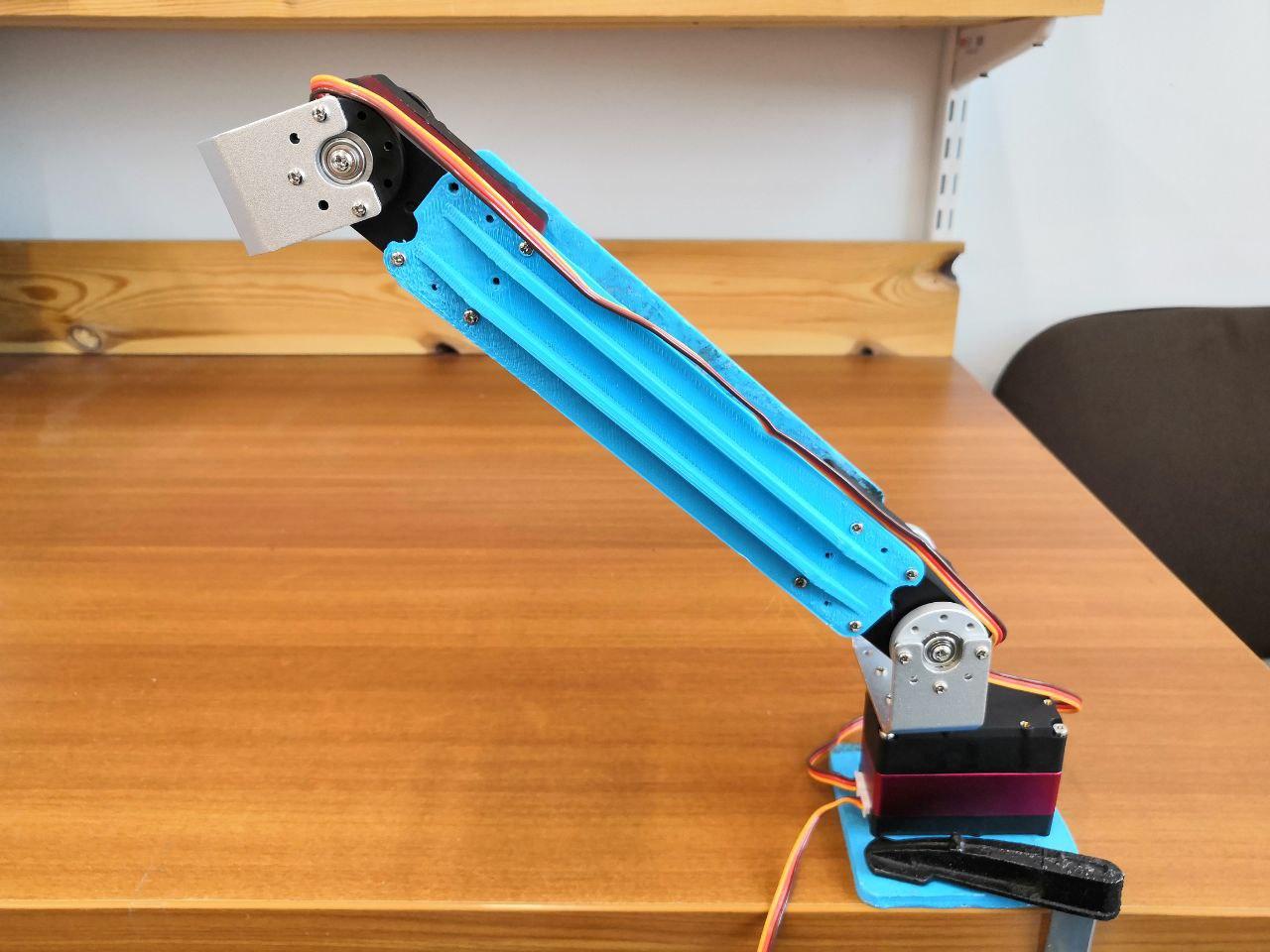
这些特性适合我们的目的,考虑到价格低两倍以上,我们决定在我们的设备中使用这些伺服器。