在1969年7月人类首次登陆月球51周年之际,让我们回想起有助于实现这种登陆的基本技术:卡尔曼滤波器。以美国裔电气工程师,数学家,匈牙利血统的发明者Rudolf Kalman的名字命名,该滤波器是他在1960年提出的一种数学技术。它对于基于具有多个传感器的观测值估计对象的位置特别有用,并且广泛用于车辆和飞机的制导,导航和控制系统。
正是在卡尔曼访问山景城的美国宇航局艾姆斯研究中心期间,美国宇航局工程师才看到卡尔曼的方法可以解决阿波罗计划的非线性轨迹估计问题。但是,无法在1960年代的计算机上运行Kalman滤波算法。一份技术备忘录(摘自NASA档案,请参阅下文)说明了1960年代和1970年代的研究工作,该研究工作在适用于实时应用(例如, ,用于飞机或航天器的机载导航。”
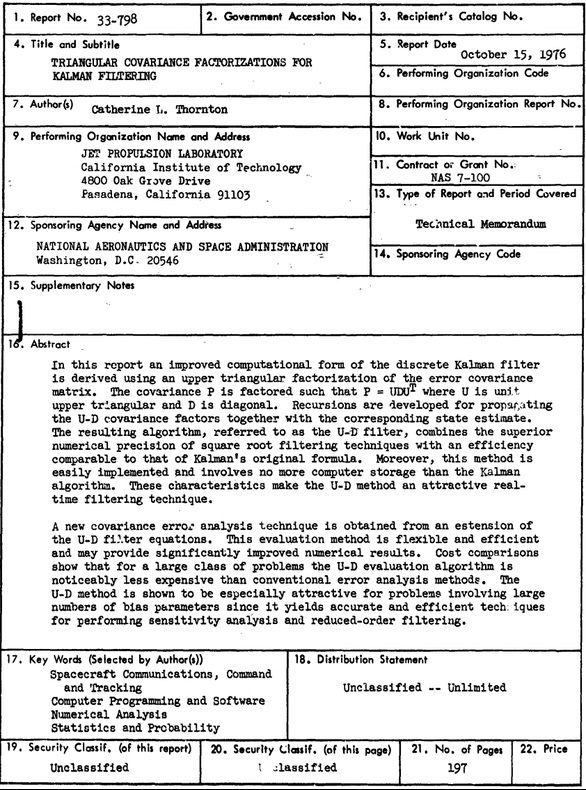
卡尔曼滤波器的三边协方差系数(NASA档案)
50年前,卡尔曼滤波器的另一个主要问题是由于8位约束导致的舍入误差而导致计算稳定性不足。已经开发出许多复杂的解决方案来解决该问题。
工程团队的努力不断进行,最终,坚持不懈得到了回报:
«» 2 , . «» . NASA . , . .
— , «».
这些工程壮举在很大程度上都使登月任务获得了成功。五十年后,卡尔曼的滤波算法在地球上的许多领域中被使用,包括机器人技术,无人机和VR游戏。东京大学的研究人员在2014年使用卡尔曼滤波器使Roomba成功地发现并避开了人。美联储使用卡尔曼滤波器确定长期中立利率并管理货币政策。
谷歌自动驾驶汽车的创建者塞巴斯蒂安·特劳恩(Sebastian Troon)讲授了有关使用卡尔曼过滤器实时跟踪物体以创建自动驾驶汽车的主题。 Autoware 宣布本月发行一套包括卡尔曼滤波器在内的开源算法,并且该算法集中于开发现实世界中无人驾驶汽车的参考实现。
在其存在的几十年中,许多技术共同发展,并达到了这样的发展阶段,即它们的结合使自动驾驶成为可能,对社会有用且有价值。但是,为了从原型过渡到商业实现,公司将努力标准化并确保组件(硬件和算法)之间的互操作性。组件的互操作性促进了竞争,而竞争有助于提高质量和降低成本,使无人驾驶的未来更加紧密,并证明了在无人驾驶汽车领域进行研发所花费的数十亿美元是合理的。
链接
:
@TeslaHackers — Tesla-, Tesla
@AutomotiveRu — ,

: